智能控制技术 ¶
约 2276 个字 预计阅读时间 9 分钟
递阶控制 ¶
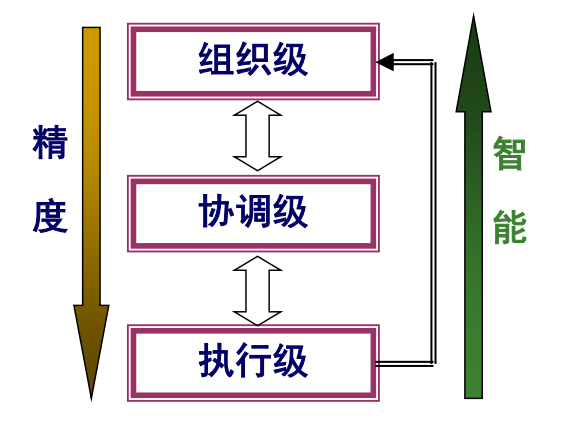
递阶控制系统由按照一定优先级和从属关系安排的子系统组成,这些子系统形成递阶结构,一般分为组织级、协调级和执行级。
- 执行级为直接控制级,其各个控制器分别控制被控对象的一部分;
- 协调级为监督控制级,其接受组织级的决策指令,协调和优化执行级各控制器的设定值,并向组织级传送执行结果信息;
- 组织级为决策控制级,其接受控制期望目标和协调级反馈信息,制定最优决策,对协调级下达决策指令。
多层控制结构
按系统中决策的复杂性来分级,是一种含有不确定因素的复杂系统。
- 直接控制层(需要很高的精度)
- 最优化层(确定控制器的设定值)
- 自适应层(关于模型和控制规律自适应)
- 自组织层(自动选择模型结构与控制,以适应环境的改变)
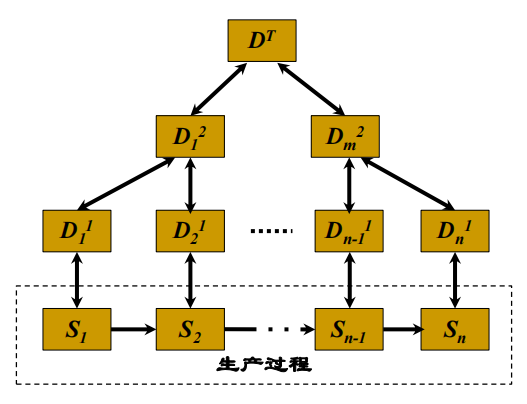
多级多目标结构
- 当系统由若干个可分的相互关联的子系统组成时,可按所有决策单元按一定支配关系递阶排列。
- 同一级各单元要受上一级的干预,同时又对下一级决策单元施加影响。同级之间不交换信息,上下级间交换信息。
- 同一级决策单元如有相互冲突的决策目标,由上一级决策单元加以协调。
- 协调的总目标是使全局达到优化或近似优化。
- 多级多目标决策单元在不同级间递阶排列,形成了金字塔式结构。
基本原理 ¶
智能机器
智能机器的高层功能模仿了人类行为,实现控制系统的规划、决策、学习、数据存取和任务协调等功能,进行知识处理与管理
-
机器知识
-
先验知识:由设计者或用户给予的初始信息。
-
经验知识:通过学习和体验取得与积累的信息。
-
机器知识率:通过智能机的知识流量,即执行任务
- 事件数据库
- 机器智能
IPDI 原理:
数学推导:\(H(R)=H(MI)+H(DB)\)
- 若知识流量不变,增大数据库 DB 的熵将减少机器智能 MI 的熵。
- 知识流 R 在信息理论意义上代表系统的工作能力。
- 在建立和执行任务期间,知识流量一般不变。
精度递增伴随智能递减
原理适用于递阶系统的单个层级和多个层级。
核心 ¶
递阶控制中的协调问题就是要选择干预向量或协调参数 ,从某个初值 经过迭代达到终值 ,从而使递阶控制达到最优。
协调原则 ¶
关联预测协调原则——直接干预法
(1)协调级预测关联:协调器要预测各子系统的关联输入输出变量
(2)子系统决策:下层的各决策单元根据预测的关联变量求解各自的决策问题,然后把达到的性能指标值送给协调器,
(3)协调级修正关联:协调器再修正关联预测值,直到总体目标达到最优为止。
关联平衡协调原则——目标协调法
(1)协调级预定子系统目标:协调器预先给出每个子系统的性能目标
(2)子系统决策:下层的各决策层单元在求解各自的优化问题时,把关联变量当作独立变量来处理,即不考虑关联的约束条件,
(3)协调级修正子目标:依靠协调器的干预信号来修正各决策单元的优化指标,以保证最后关联约束得以满足,这时目标函数中修正的值应趋于零。
分级递阶智能控制 ¶
组织级 ¶
智能最高,执行最高决策的控制功能
对于给定的外部命令和任务,设法找到能够完成该任务的子任务(或动作)组合。
组织级将要求发送给协调级,同时接收协调及反馈的信息,对之前储存的信息进行修改,起到学习的作用

(左)组织级 (右)协调级
协调级 ¶
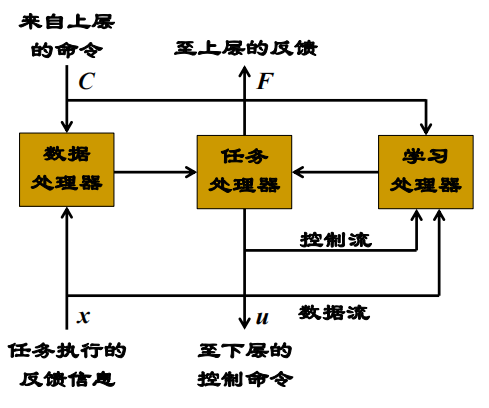
分行架构:在内部再进行分级
分为分派器与协调器,两者具有统一的结构
- 数据处理器
- 任务处理器
- 学习处理器
执行级 ¶
智能程度最低,控制精度最高
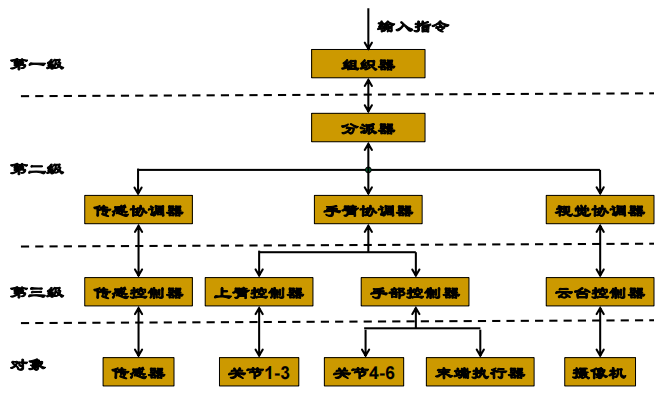
递阶智能控制智能的分解 ¶
智能主要体现在高层次上
机械臂递阶控制系统结构
专家控制 ¶
基本知识 ¶
特点
- 启发性
- 透明性
- 灵活性
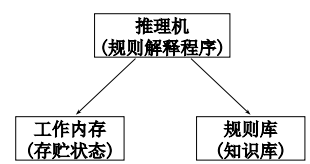
组成:知识库、推理机、综合数据库、解释接口、知识获取
专家系统与常规程序的区别
一般应用程序把问题求解的知识隐含地编入程序,把知识组织为两组:数据级和程序级
专家系统将知识组织成三级;数据、知识库和控制。即控制(推理)与知识库分离
例:中医的专家系统,将知识库变为西医,控制可以不变
知识表示方式 ¶
大多数知识表示法都需要对叙述性知识和过程性知识提供描述方法
产生式规则表示法 ¶
规则的一般形式为
- 条件部分可以是逻辑组合或表达式。行动部分可以是中间结果、最终结果或相应动作
- 为了表达时间概念,可引入一个时间因子嵌入到规则的条件或结论部分
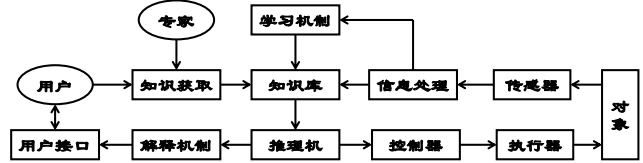
基于规则的系统结构
框架表示法 ¶
框架通常是由框架 (frame) 名、槽 (slot) 名、侧面 (aspect) 名及值 (value) 四部分组成
框架常用的推理有继承推理和过程推理
黑板表示法 ¶
黑板模型是一种功能强大的知识处理结构和问题求解模型,可以处理大量不同的、错误的和不完整的知识,以求解问题。
黑板模型主要由一个具有层次结构的黑板、一套独立的知识源和调度器组成。
-
黑板
-
用于存储所有知识源可访问的知识,它的全局数据结构被用于组织问题求解数据,并处理各知识源之间的通讯问题。
-
知识源
-
专门用于处理一定类型的较窄领域信息或知识的独立程序,而且具有决定是否应当把自身信息提供给问题求解过程的能力。
-
调度器
-
由某个知识源向黑板增添新的信息,触发其它对新送来的信息感兴趣的知识源,执行某些测试过程,以决定它们是否能够被合法执行,最后,一个被触发了的知识源被选中,执行向黑板增添信息的任务。
- 这个循环不断进行下去。
混合表示法 ¶
包括两种及两种以上表示方法的组合表示法。
结构、类型与设计 ¶
设计原则 ¶
- 控制对象的建模
通过建模的过程,可以明确求解问题所需要的知识以及知识的基本结构,能够利用基于模型的推理方法来解决控制问题。
- 与现有系统和控制方式的结合
把专家控制方法与传统控制方法相结合
学习机制很重要!!
推理模型 ¶
专家控制中的问题求解机制可表示为推理模型 U=f(E, K, I)
- 其中,U 为控制器的输出作用集,
- E 为控制器的外部数据输入集,
- K 为系统的知识信息集,
- I 为具体推理机构的输出集
专家控制系统分类 ¶
直接专家控制系统:直接控制输入
间接专家控制系统:调节基本控制器或控制装置的参数
模糊控制 ¶
总体架构

模糊化 ¶
模糊化曲线可以根据经验选择 , 也可以通过统计数据进行拟合
例
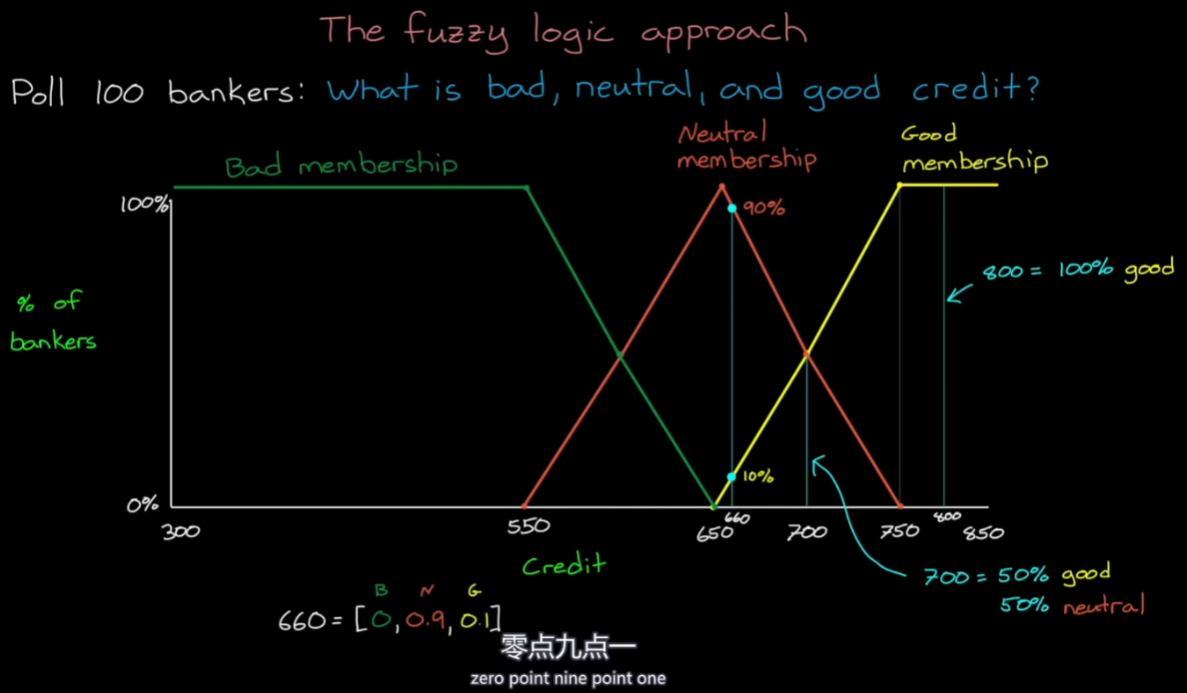
从 660 的信誉分到达 [0,0.9,0.1] 这个模糊结果
进行推理 ¶
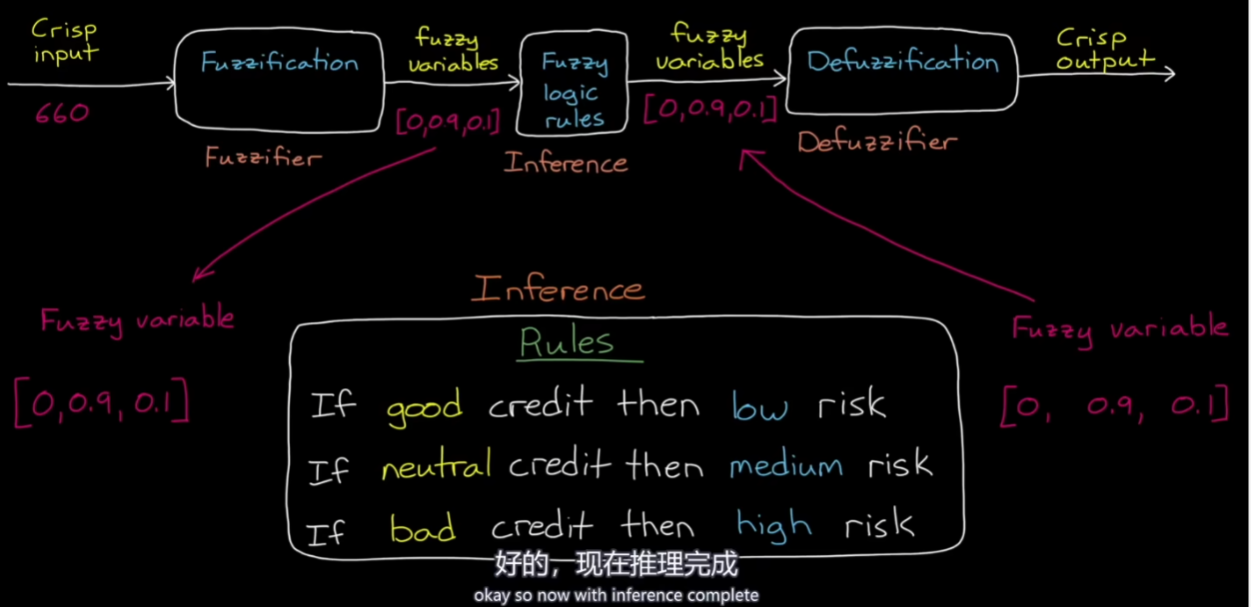
去模糊化 ¶
作业 ¶
第一次作业
第二次作业
第三次作业
第四次作业