智能电子设备开发 ¶
约 464 个字 124 行代码 预计阅读时间 3 分钟
课程资源
10% 平时 +10% 读书报告 +10% 思政报告 +30% 设计作业 +40% 实物制作
大作业——柔性材料传感器 ¶
原理 ¶
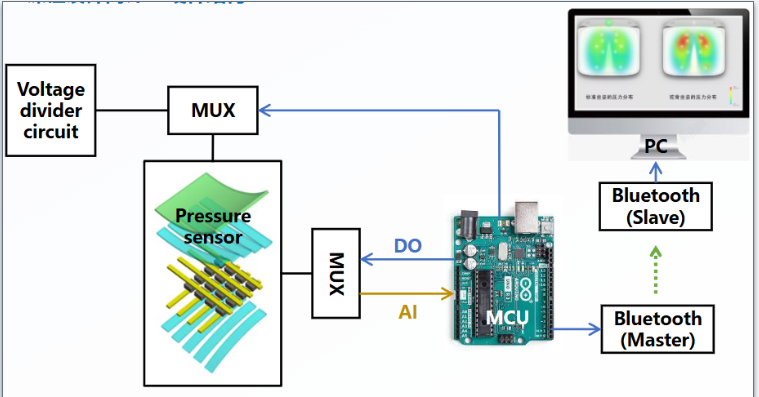
利用压敏电阻片受到压力会产生形变导致电阻发生变化,因此其两端的电压值会发生变化,利用 Arduino 的 ADC 口测量其电压值。通过两个 MUX 可以控制阵列不同地方的导通,因此可以依次读取阵列所有点的压力值。
硬件部分 ¶
| 材料 | 数量 |
|---|---|
| MUX 多通道复用器 | 2 |
| HC-05 模块 | 2 |
| Arduino | 1 |
| USB-TTL | 1 |
| LM358 功放 | 2 |
| 面包板 | 1 |
制作一个 2x2 阵列的传感器进行数据读取
- 将压敏导电片进行裁剪,将其剪成 1cm*1cm 的小方块;
- 拿出铜箔胶带,裁剪成宽度为 0.5cm 左右的宽度;
- 利用提供的塑封带,将铜箔胶带贴在塑封袋的两边,使得与压敏导电片接触并将电流引出来;
- 制作成一个简单的 2X2 的阵列,以便后面实验进行。
连接如下图所示
软件配置 ¶
蓝牙模块配置 ¶
关于从机与主机与蓝牙的连接方式
从机
| HC-05 | USB-TTL |
|---|---|
| VCC | 5V |
| GND | GND |
| TXD | RXD |
| RXD | TXD |
主机(与 Arduino 练级)
| HC-05 | Arduino |
|---|---|
| STATE | 不连 |
| RXD | pni11 |
| TXD | pin10 |
| GND | GND |
| VCC | 5V |
| EN | 不连 |
关于主从机蓝牙连接的配置
# 从机配置
AT # 测试指令,响应:OK
AT+ORGL # 恢复默认设置,响应:OK
AT+ROLE=0 # 将模块设置成从机模式,响应:OK
AT+ADDR? # 获取模块蓝牙地址
AT+PSWD=1122 # 设置配对码为1122
# 主机配置
AT # 测试指令,响应:OK
AT+ORGL # 恢复默认设置,响应:OK
AT+ROLE=1 # 将模块设置成主机模式,响应:OK
AT+PSWD=1122 # 设置配对码为1122
AT+CMODE=0 # 设置为指定蓝牙地址连接模式
AT+BIND=xx # 绑定蓝牙地址,xx为上面从机获得的地址
测试代码 ¶
Arduino 代码 ¶
通过 Arduino 的串口监视器可以发送信息,电脑端可以收到
#include <SoftwareSerial.h>
// Pin10接HC05的TXD
// Pin1接HC05的RXD
SoftwareSerial BT(10, 11);
char val;
void setup() {
Serial.begin(38400);
Serial.println("bluetooth is ready!");
BT.begin(38400);
}
void loop() {
if (Serial.available()) {
val = Serial.read();
BT.print(val);
}
if (BT.available()) {
val = BT.read();
Serial.print(val);
}
}
PC 端代码 ¶
import serial
# 配置串口的参数
port = 'COMX' # 替换为你的实际串口
baudrate = 38400 # 波特率,根据实际设备的配置
timeout = 1 # 设置超时时间,单位为秒
# 初始化串口
try:
ser = serial.Serial(port, baudrate, timeout=timeout)
print(f"已连接到 {port}")
except serial.SerialException as e:
print(f"无法打开串口: {e}")
exit()
# 持续读取串口数据并打印
try:
while True:
if ser.in_waiting > 0: # 检查是否有数据可读取
data = ser.readline()#.decode('utf-8').strip() # 读取一行并去掉末尾的换行符
print(f"接收到的数据: {data}")
except KeyboardInterrupt:
print("程序终止")
# 关闭串口
finally:
ser.close()
print("串口已关闭")
这样就可以验证通讯是否能够进行,接下来就可以进行 MUX 控制开关实现电压的读取了
MUX¶
读取示例代码
int s0 = 8;
int s1 = 9;
int s2 = 10;
int s3 = 11;
//Mux in “SIG” pin
int SIG_pin = 0;
void setup(){
pinMode(s0, OUTPUT);
pinMode(s1, OUTPUT);
pinMode(s2, OUTPUT);
pinMode(s3, OUTPUT);
digitalWrite(s0, LOW);
digitalWrite(s1, LOW);
digitalWrite(s2, LOW);
digitalWrite(s3, LOW);
Serial.begin(9600);
}
void loop(){
//Loop through and read all 16 values
//Reports back Value at channel 6 is: 346
for(int i = 0; i < 16; i ++){
Serial.print("Value at channel ");
Serial.print(i); Serial.print("is : ");
Serial.println(readMux(i));
delay(1000);
}
}
int readMux(int channel){
int controlPin[] = {s0, s1, s2, s3};
int muxChannel[16][4]={ {0,0,0,0}, //channel 0
{1,0,0,0}, //channel 1
{0,1,0,0}, //channel 2
{1,1,0,0}, //channel 3
{0,0,1,0}, //channel 4
{1,0,1,0}, //channel 5
{0,1,1,0}, //channel 6
{1,1,1,0}, //channel 7
{0,0,0,1}, //channel 8
{1,0,0,1}, //channel 9
{0,1,0,1}, //channel 10
{1,1,0,1}, //channel 11
{0,0,1,1}, //channel 12
{1,0,1,1}, //channel 13
{0,1,1,1}, //channel 14
{1,1,1,1} //channel 15
}; //loop through the 4 sig
for(int i = 0; i < 4; i ++){
//read the value at the SIG pin
digitalWrite(controlPin[i], muxChannel[channel][i]);
}
int val = analogRead(SIG_pin);
//return the value
return val;
}
实际代码 ¶
Arduino¶
PC¶