电气控制技术 ¶
约 3103 个字 预计阅读时间 12 分钟
电机学 ¶
直流电动机 ¶
基本结构:定子 转子
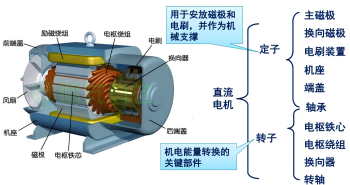
- 注:换向器相邻两片之间相互绝缘
电枢绕组 ¶
-
电枢绕组:转子上的线圈(叠绕组、波绕组、蛙形绕组)
-
绕组元件:两端出线分别和两片换向片 联接的单匝或多匝线圈
-
实槽数:电枢表面所开的嵌线槽,用 Z 表示
-
虚槽数:\(Z_i\) = μZ 同一个槽内放置 μ 元件
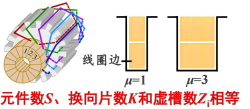
- 元件数 S、换向片数 K 和虚槽数 \(Z_i\) 相等
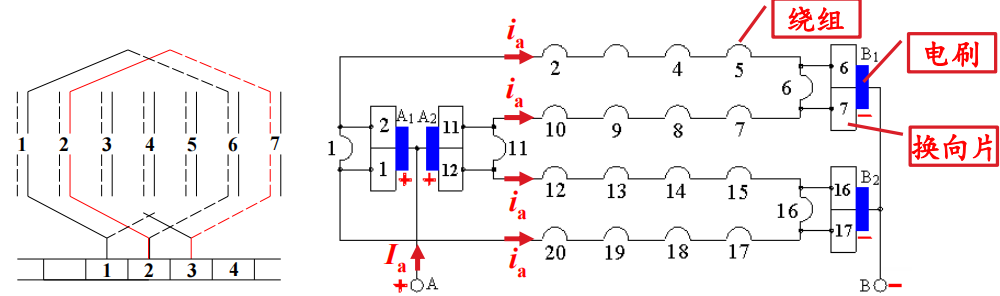
叠绕组 ¶
- 适用于高电流
-
-
单叠绕组的并联支路对数 a 和主磁极极对数 p 相等
-
电枢电流:\(I_a = 2ai_a,其中i_a为每条支路的电流\)
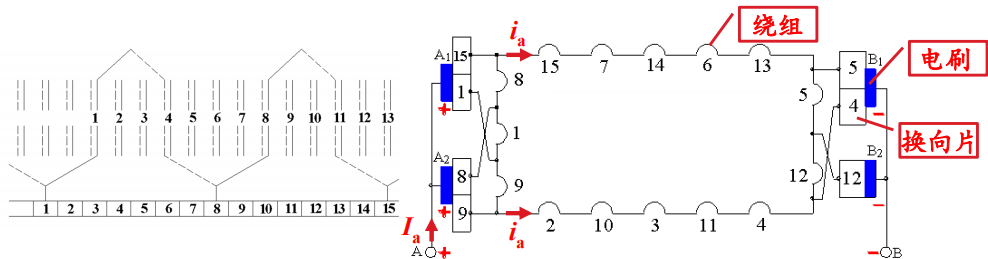
波绕组 ¶
- 高电压(每条支路上电阻多)
-
-
单波绕组的并联支路对数 a=1
- 电枢电流:\(I_a = 2ai_a,其中i_a为每条支路的电流\)
励磁方式 ¶
励磁方式是指励磁绕组中励磁电流的获得方式
一共有两套绕组:励磁绕组和电枢绕组
可以理解为电枢绕组先通电,然后通过以下几种方式使得励磁绕组获得励磁电流
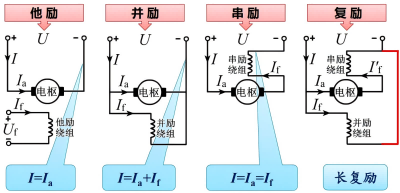
复励分为长复励与短复励:
- 长复励:串励电阻与电枢串后再与并励电阻并
- 短复励:电枢与并励电阻并后再与串励电阻串
直流电动机额定值 ¶
- 额定功率 \(P_N\)
- 额定电压 \(U_N\)
- 额定电流 \(I_N\)
- 额定转速 \(n_N\)
- 额定效率 \(\eta_N\)
\(P_N = U_N I_N \eta_N\)
额定功率是指电动机的输出功率
基本工作原理 ¶
换向器与电刷的共同作用使得外加直流,到电枢内部就变成了交流的形式,实现了持续旋转
感应电动势 ¶
\(每根导体感应的平均电动势: \quad e_{av} =B_{av}lv \\\) \(导体切割磁场线的线速度: \quad v=\frac{2\pi R}{60}n = \frac{2p\tau}{60}n \\\) \(电枢绕组感应电动势: \quad E = \frac{N}{2a}\frac{\Phi}{l\tau}l\frac{2p\tau n}{60} = \frac{pN}{60a}\Phi n = C_e \Phi n \\\) \(其中C_e = \frac{pN}{60a}称为电动势常数\)
电磁转矩 ¶
\(T_{em}=NB_{av}li_a \frac{D_a}{2}\\\) \(T_{em} = N\frac{\Phi}{l\tau}l\frac{I_a}{2a}\frac{2p\tau}{2\pi}=\frac{pN}{2\pi a}\Phi I_a=C_T \Phi I_a\\\) \(C_T=\frac{pN}{2\pi a} 称为转矩常数\)
其中 \(C_T/C_e = 60/2\pi = 9.55\)
并励直流电动机的机械特性 ¶
电路图 ¶
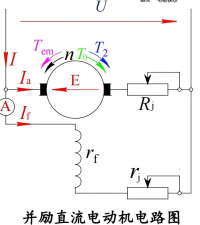
基本方程 ¶
1. 电动势平衡方程
\(U = E+I_a(R_a+R_j)\\\) \(U=I_f(r_f+r_j)=I_fR_f\)
转速公式
\(由E=C_e\Phi n得: n = \frac{U-I_a(R_a+R_j)}{C_e \Phi}\\\)
2. 转矩平衡方程
稳定运行时:\(T_{em} =T_2+T_0 = T_c\) - \(T_c\)为总负载转矩,\(T_2\)为输出转矩 ,\(T_0\)为空载转矩
变速过程 :\(T_{em} =T_2+T_0 + J\frac{d \Omega}{dt} = T_c +\frac{GD^2 dn}{375dt}\) - J为转动惯量,\(GD^2\)为飞轮距
3. 功率平衡方程
输入功率:\(P_1 = UI = U(I_a +I_f)\)
当电枢回路不串外接电阻 \(R_j\) 时:\(P_1 = (E + I_a R_a) I_a + U I_f = E I_a + I_a^2 R_a + U I_f = P_{em} + p_{cua} + p_{cuf}\)
- 其中,\(P_{em}为电磁功率,p_{cua}为电枢回路总损耗,p_{cuf}为励磁回路总损耗\)
电动机的电磁功率:
\(P_{em} = E I_a = T_{em} \Omega = \left(T_2 + T_0\right) \Omega = P_2 + p_0\)
- 其中 \(P_2为输出机械功率,p_0为空载损耗\)
\(p_0 = p_{Fe} + p_{mec} + p_{ad}\)
- 其中 \(p_{Fe}为机械损耗,p_{ad}为附加损耗\)
\(P_1 = p_{\text{cuf}} + p_{\text{cua}} + p_{Fe} + p_{\text{mec}} + p_{\text{ad}} + P_2 = \sum p + P_2\)
- 其中 \(P_2 = P_N\)
机械特性 ¶
机械特性一般表达式:\(n = \frac{U}{C_e \Phi} - \frac{R_a + R_j}{C_e \Phi} I_a = \frac{U}{C_e \Phi} - \frac{R_a + R_j}{C_e C_T \Phi^2} T_{em}\)
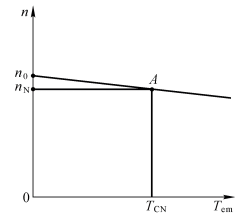
并励直流电动机的自然机械特性 ¶
\(n = \frac{U}{C_e \Phi_N} - \frac{R_a + R_j}{C_e \Phi_N} I_a = \frac{U}{C_e \Phi_N} - \frac{R_a + R_j}{C_e C_T \Phi_N^2} T_{em} = n_0 - \beta_N T_{em}\)
$ 其中,Phi_N: 额定运行下的每极有效磁通 quad n_0: 额定电压、额定励磁时所对应的理想空载转速 $
$ beta_N: 自然机械特性的斜率 $
额定负载时转速降越小越好
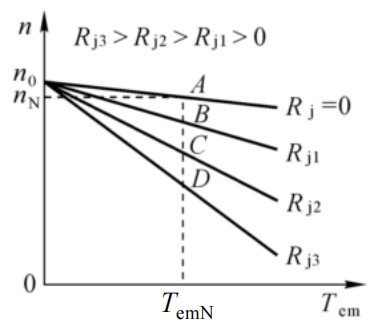
并励直流电动机的人为机械特性 ¶
①改变电枢回路外接电阻 \(R_j\) 的人为机械特性
\(n = \frac{U_N}{C_e \Phi_N} - \frac{R_a + R_j}{C_e C_T \Phi_N^2} T_{em} = n_0 - \beta T_{em}\)
\(R_j\) 越大,斜率也就越大
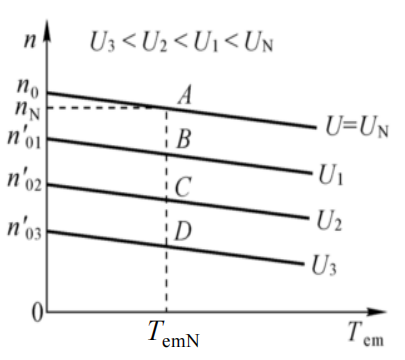
②改变电枢端 U 的人为机械特性
\(n = \frac{U}{C_e \Phi_N} - \frac{R_a}{C_e C_T \Phi_N^2} T_{em} = n_0' - \beta_N T_{em}\)
实际上改变的是空载转速 \(n_0\)
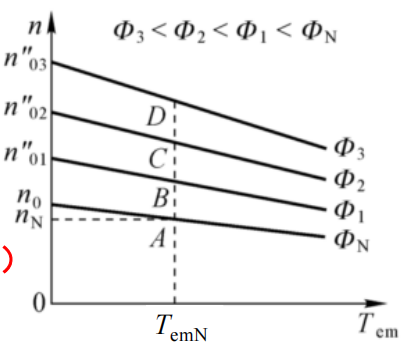
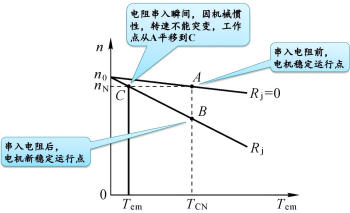
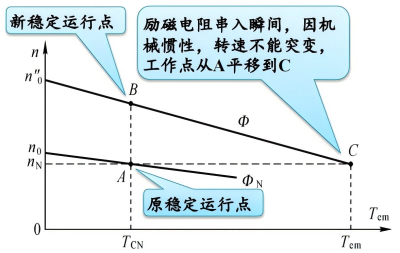
③减弱主磁通 Φ 的人为机械特性 ( 即增大励磁回路外接电阻 \(r_j\))
\(n = \frac{U_N}{C_e \Phi} - \frac{R_a}{C_e C_T \Phi^2} T_{em} = n_0'' - \beta' T_{em}\)
直流电动机的启动、制动与调速 ¶
起动 ¶
存在问题:启动时,n 与 E 均为 0,\(I_a = \frac{U_N - E}{R_a}\) 为额定电流的十几倍以上。
要求:控制起动电流为额定电流的 1.5~2 倍
解决方法:
- 降低电枢端电压起动
起动电压很低,随着 n 的升高,U 也增加
- 电枢回路串电阻起动
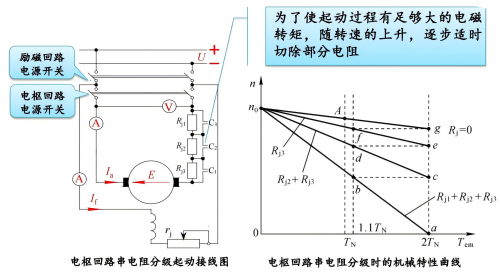
\(I_{st}=I_a = \frac{U_N}{R_a +R_j}\)
随着转速的上升,逐步减小 \(R_j\) 的阻值,实现从 \(a->b->c->e->f->g->A\) 的目标
调速 ¶
- 改变电枢端电压调速(降压调速)
- 改变串入电枢回路电阻调速
- 改变励磁电流调速(弱磁调速)
不适合恒转矩负载,因为电流会变大,电动机会过热
制动 ¶
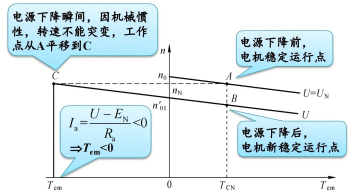
- 能耗制动
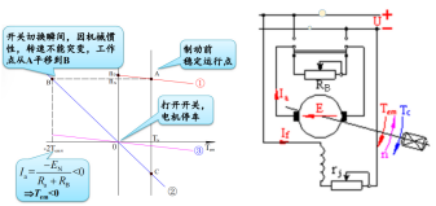
准备制动时,如右图所示,电源断开,不再进行供电,此时 \(n = -\frac{R_a+R_B}{C_e C_T \Phi_N^2}T_{em}\), 因此从线①的 A 点变到线②的 B 点,一般来说需要串联电阻 \(R_B\) 来保护电流,因此从线①的 A 点变到线③。
- 反接制动
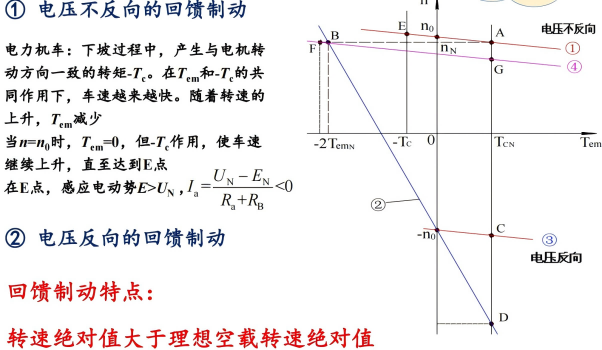
- ① 电压反向的反接制动
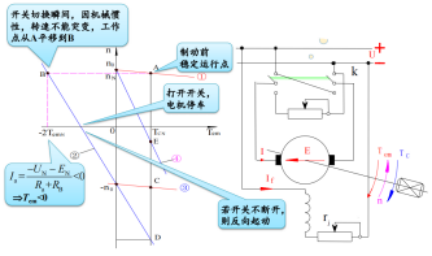
准备制动时,电源电动势反向,此时 \(n = \frac{-U_N}{C_e\Phi_N}-\frac{R_a+R_B}{C_e C_T \Phi_N^2}T_{em}\), 因此,从图中的①线的 A 点变为②线的 B 点
- ② 电势反向的反接制动
上图中,对于位能性负载,即力矩不发生变化,因此会从线①的 A 点慢慢变到线②的 D 点,中间有一时刻转速为 0。
- 回馈制动
变压器 ¶
分类 ¶
- 相数:单相、三相
- 绕组:双绕组、三绕组、多绕组、自耦
- 冷却方式:油浸式、干式
- 铁心结构 :芯式、壳式
基本结构(非重点)¶
结构:铁心;高、低压两套绕组
铁芯:叠片式、渐开线式 - 其中,叠片式又分芯式和壳式
额定值 ¶
额定容量:\(S_N\)(视在功率 VA) - 原边、副边的额定容量相等
额定电压:原边 \(U_{1N}\), 副边 \(U_{2N}\) - 副边额定电压 \(U_{2N}\) 是变压器原边外加额定电压 \(U_{1N}\) 时副边的空载电压 - 三相变压器,额定电压指线电压
额定电流:原边 \(I_{1N}\), 副边 \(I_{2N}\) - 单相变压器: \(I_{1N} = \frac{S_N}{U_{1N}} \quad I_{2N} = \frac{S_N}{U_{2N}}\) - 三相变压器: \(I_{1N} = \frac{S_N}{\sqrt{3}U_{1N}} \quad I_{2N} = \frac{S_N}{\sqrt{3}U_{2N}}\)
额定频率:\(f_N = 50Hz\)
基本工作原理 ¶
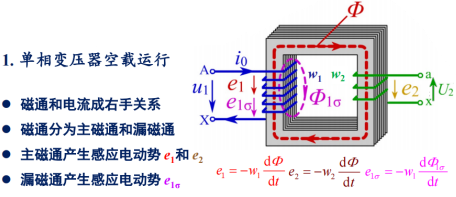
- 若磁通按正弦规律变化,即 \(\Phi = \Phi_msin\omega t \quad e_1 = -w_1 \omega \Phi_m cos\omega t = 2 \pi fw_1 \Phi_m sin(\omega t -90^0)\)
- 用向量表示有 \(\dot{E_1} = -j\sqrt{2}\pi fw_1 \dot{ \Phi}_m = -j4.44 fw_1 \dot{ \Phi}_m\)
- 同理有 \(\dot{E_2} = -j \sqrt{2}\pi fw_2 \dot{ \Phi}_m= -j 4.44 fw_2 \dot{ \Phi}_m\)
- 变压器变比 \(k = \frac{E_1}{E_2}=\frac{w_1}{w_2} \simeq \frac{U_{1N}}{U_{2N}}\)
- \(w_1与w_2为匝数\)
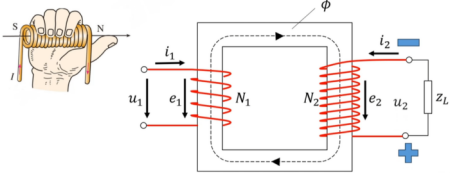
U 和 E 正方向的判定 ¶
首先考虑一个简单的通电螺线管,将通电的螺线管看作一个电源,电源内部电流从负极流向正级,因此 E 和 U 的方向如下图所示
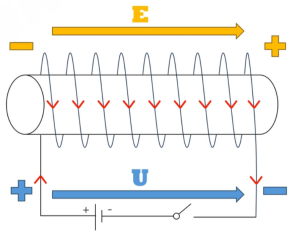
原边的方向与上述通电螺线管判断一致。再根据右手定则判断磁通的方向,如图 \(\phi\) 所示,再根据右手螺旋定则判断副边电流 \(i_2\) 的方向,再根据上面的方法判断 E 和 U 的方向 ,\(U_2\) 由于是负载端,因此 \(U_2\) 的方向与电流方向保持一致。
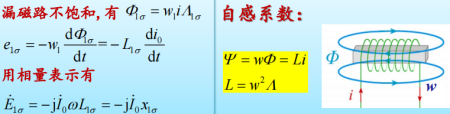
单相变压器空载运行 ¶
原边等效电路
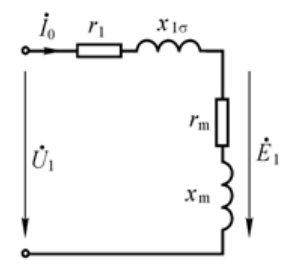
- 原边电动势平衡方程式
\(u_1 = -e_1 - e_{1\sigma} + i_0 r_1\)
\(\dot{U}_1 = -\dot{E}_1 - \dot{E}_{1\sigma} + \dot{I}_0 r_1= -\dot{E}_1 + j\dot{I}_0 x_{1\sigma} + \dot{I}_0 r_1= -\dot{E}_1 + \dot{I}_0 Z_1\)
- 副边电动势平衡方程式
\(u_2=e_2\)
\(\dot{U}_2 = \dot{E}_x\)
单相变压器负载运行 ¶
- 磁动势平衡方程
\(\dot{F}_1=\dot{I}_1 w_1\)
\(\dot{F}_2=\dot{I}_2 w_2\)
\(\dot{F}_1 +\dot{F}_2 =\dot{F}_m=\dot{I}_m w_1\)
- 励磁电流
\(\dot{I}_m = \dot{I}_1+ \frac{w_2}{w_1}\dot{I}_2\)
- 电动势平衡方程式
\(\dot{U}_1 = -\dot{E}_1 - \dot{E}_{1\sigma} + \dot{I}_1 r_1= -\dot{E}_1 + j\dot{I}_1 x_{1\sigma} + \dot{I}_1 r_1= -\dot{E}_1 + \dot{I}_1 Z_1\)
\(\dot{U}_2 = \dot{E}_2 + \dot{E}_{2\sigma} - \dot{I}_2 r_2= \dot{E}_2 - j\dot{I}_2 x_{2\sigma} - \dot{I}_2 r_2= \dot{E}_2 + \dot{I}_2 Z_2\)
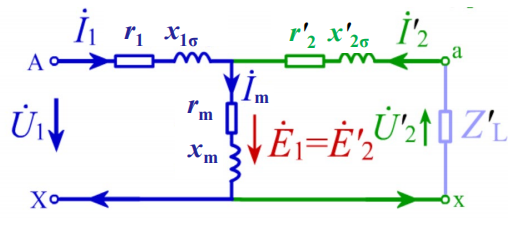
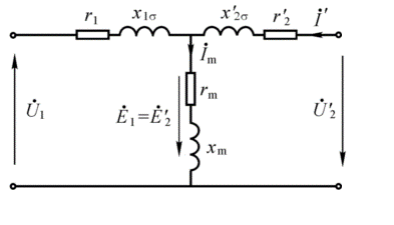
折算 ¶
用一个匝数和原边线圈相等的新的副边线圈来替代实际的副边线圈
折算方法:
- 电动势 / 电压的折算值——原值乘以 k
- 电流的折算值——原值除以 k
- 阻抗的折算值——原值乘以 \(k^2\)
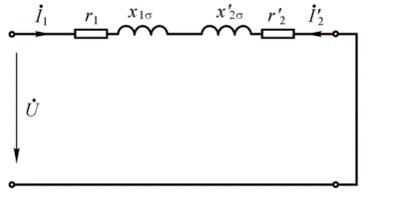
折算后的基本方程式 $$ dot{U}{1} = -dot{E}} + dot{I{1} r} + j dot{I{1} x \ dot{U}{2}^{prime} = dot{E}}^{prime} - dot{I{2}^{prime} r}^{prime} - j dot{I{2}^{prime} x \ dot{U}}^{prime{2}^{prime} = dot{I}}^{prime} Z_{L}^{prime} = dot{I{2}^{prime} left(Rright) \ dot{I}}^{prime} + j x_{L}^{prime{1} + dot{I}}^{prime} = dot{I{m} \ dot{E}} = dot{E{2}^{prime} = -j 4.44 f w} dot{Phi{m} \ dot{E}} = dot{E{2}^{prime} = -dot{I}} Z_{m} = -dot{I{m} left(rright) $$ 变压器等效电路图如下图所示} + j x_{m
参数测定 ¶
空载实验 ¶
一般在低压侧加额定电压
低压变做空载实验时电压较低,电流较大,有利于实验安全和仪器选择
降压变压器:在副边进行空载实验
升压变压器:在原边进行空载实验
由于 \(Z_m远大于Z_1\),因此认为 \(U_1\) 与 \(E_1\) 值相等
以降压变压器为例子 $$ z_{2~m} = frac{U_0}{I_0} \
r_{2~m} = frac{p_0}{I_0^2} \
x_{2~m} = sqrt{z_{2~m}^2 - r_{2~m}^2} $$ 三式联立求解,最后则算到原边 $$ z_m = k^2 z_{2~m} \ r_m = k^2 r_{2~m} \ x_m = k^2 x_{2~m} $$
负载实验 ¶
以降压变压器为例子 $$ Z_k = U_k/I_k \ r_k = p_k/I_k^2\ x_k = sqrt{z_k2-r_k2} $$
外特性与电压变化率 ¶
外特性 ¶
\(U_1 = U_{1N},cos\phi_2=常数时,U_2=f(I_2)\) 的关系曲线称为变压器的外特性
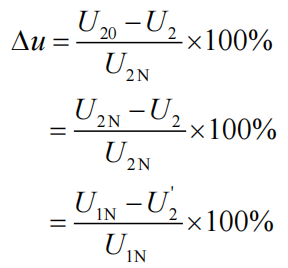
电压变化率(电压调整率)¶
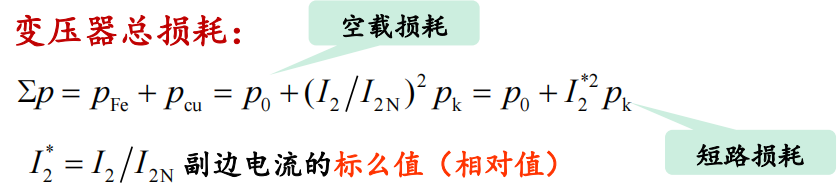
损耗与效率 ¶
基本铜耗:原、副边绕组中电流引起的电阻损耗
附加铜耗:导体在交变漏磁场作用下引起集肤效应,有效电阻增大而增加的铜耗
基本铁耗:铁心中的磁滞和涡流损耗
附加铁耗:结构件中的涡流损耗
异步电机 ¶
异步电动机结构和额定值 ¶
结构 ¶
鼠笼式和绕线式
额定值 ¶
- 额定功率 \(P_N\)
- 额定电压 \(U_N\) (线电压)
- 额定电流 \(I_N\)(线电流)
- 额定转速 \(n_N\)
- 额定效率 \(\eta_N\)
\(P_N = \sqrt{3} U_N I_N cos\phi_N \eta_N\)
各种参数 ¶
槽距角
极距
每级每相槽数