机器人自动走迷宫 ¶
约 2965 个字 257 行代码 预计阅读时间 15 分钟
实验目的 ¶
-
掌握迷宫环境下的路径规划算法,包括深度优先搜索(DFS)算法的实现和应用。
-
探索强化学习在复杂环境中的应用,尤其是利用深度强化学习(DQN)算法解决机器人路径规划问题。
-
通过对比传统算法和强化学习方法,理解不同算法的优缺点。
-
学习基于 PyTorch 深度学习框架的机器人训练与路径规划实现。
实验介绍 ¶
实验内容 ¶
在本实验中,要求分别使用基础搜索算法和 Deep QLearning 算法,完成机器人自动走迷宫。
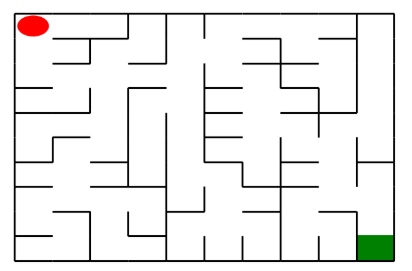
如上图所示,左上角的红色椭圆既是起点也是机器人的初始位置,右下角的绿色方块是出口。
游戏规则为:从起点开始,通过错综复杂的迷宫,到达目标点(出口)。
- 在任一位置可执行动作包括:向上走
'u'、向右走'r'、向下走'd'、向左走'l'。 -
执行不同的动作后,根据不同的情况会获得不同的奖励,具体而言,有以下几种情况。
- 撞墙
- 走到出口
- 其余情况
-
需要您分别实现基于基础搜索算法和 Deep QLearning 算法的机器人,使机器人自动走到迷宫的出口。
实验要求 ¶
- 使用 Python 语言。
- 使用基础搜索算法完成机器人走迷宫。
- 使用 Deep QLearning 算法完成机器人走迷宫。
- 算法部分需要自己实现,不能使用现成的包、工具或者接口。
实验环境 ¶
可以使用 Python 实现基础算法的实现, 使用 Keras、PyTorch 等框架实现 Deep QLearning 算法。
注意事项 ¶
- Python 与 Python Package 的使用方式,可在右侧
API文档中查阅。 - 当右上角的『Python 3』长时间指示为运行中的时候,造成代码无法执行时,可以重新启动 Kernel 解决(左上角『Kernel』-『Restart Kernel
』 ) 。
参考资料 ¶
- 强化学习入门 MDP:https://zhuanlan.zhihu.com/p/25498081
- QLearning 示例:http://mnemstudio.org/path-finding-q-learning-tutorial.htm
- QLearning 知乎解释:https://www.zhihu.com/question/26408259
- DeepQLearning 论文:https://files.momodel.cn/Playing%20Atari%20with%20Deep%20Reinforcement%20Learning.pdf
实验内容 ¶
Mzae 类 ¶
创建迷宫 ¶
通过迷宫类 Maze 可以随机创建一个迷宫。
- 使用 Maze(maze_size=size) 来随机生成一个 size * size 大小的迷宫。
- 使用 print() 函数可以输出迷宫的 size 以及画出迷宫图
- 红色的圆是机器人初始位置
- 绿色的方块是迷宫的出口位置
重要的成员方法 ¶
在迷宫中已经初始化一个机器人,你要编写的算法实现在给定条件下控制机器人移动至目标点。
Maze 类中重要的成员方法如下:
- sense_robot() :获取机器人在迷宫中目前的位置。
return:机器人在迷宫中目前的位置。
- move_robot(direction) :根据输入方向移动默认机器人,若方向不合法则返回错误信息。
direction:移动方向 , 如 :"u", 合法值为: ['u', 'r', 'd', 'l']
return:执行动作的奖励值
- can_move_actions(position):获取当前机器人可以移动的方向
position:迷宫中任一处的坐标点
return:该点可执行的动作,如:['u','r','d']
- is_hit_wall(self, location, direction):判断该移动方向是否撞墙
location, direction:当前位置和要移动的方向,如 (0,0) , "u"
return:True( 撞墙 ) / False( 不撞墙 )
- draw_maze():画出当前的迷宫
强化学习算法 ¶
强化学习作为机器学习算法的一种,其模式也是让智能体在“训练”中学到“经验”,以实现给定的任务。
但不同于监督学习与非监督学习,在强化学习的框架中,我们更侧重通过智能体与环境的交互来学习。
通常在监督学习和非监督学习任务中,智能体往往需要通过给定的训练集,辅之以既定的训练目标(如最小化损失函数),通过给定的学习算法来实现这一目标。
然而在强化学习中,智能体则是通过其与环境交互得到的奖励进行学习。
这个环境可以是虚拟的(如虚拟的迷宫),也可以是真实的(自动驾驶汽车在真实道路上收集数据)。
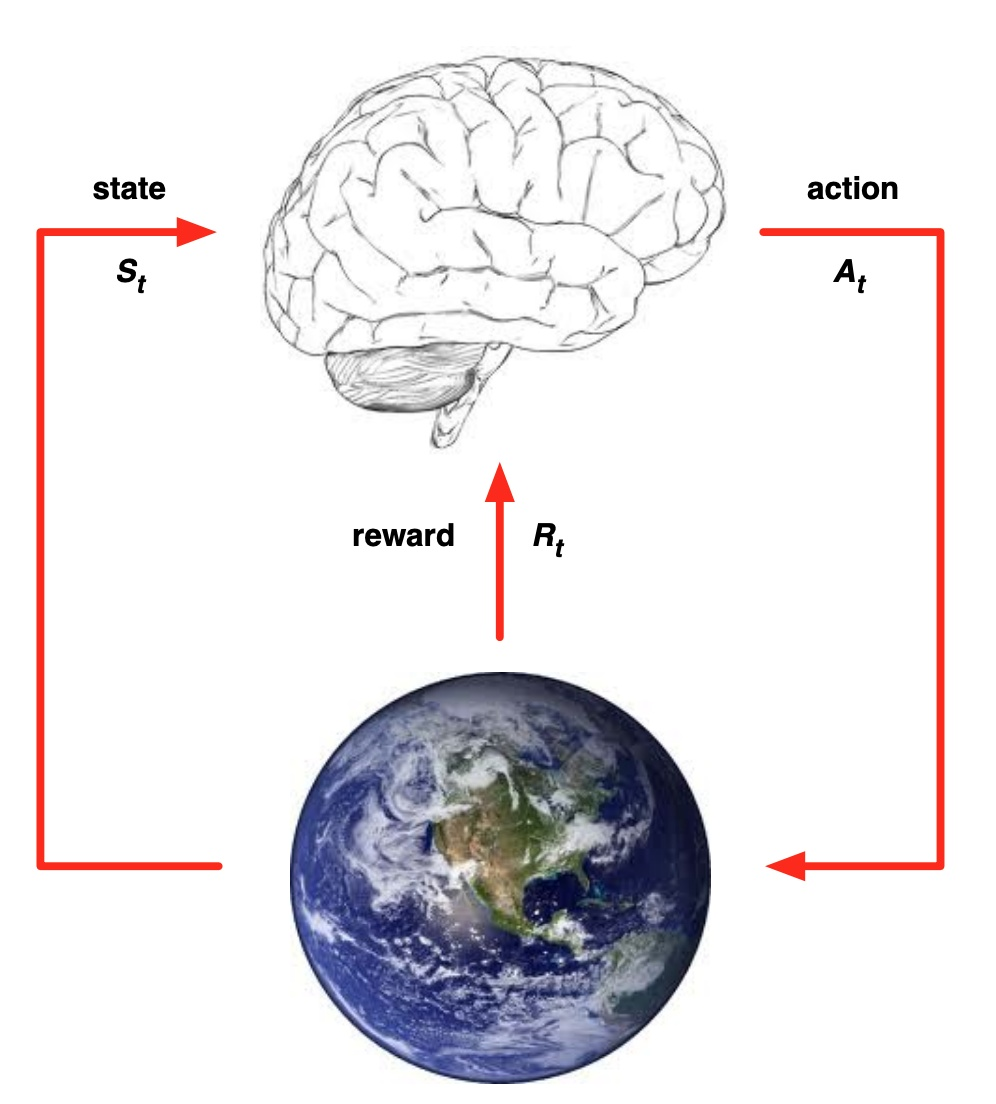
在强化学习中有五个核心组成部分,它们分别是:环境(Environment)、智能体(Agent)、状态(State)、动作(Action)和奖励(Reward)。
在某一时间节点 \(t\):
- 智能体在从环境中感知其所处的状态 \(s_t\)
- 智能体根据某些准则选择动作 \(a_t\)
- 环境根据智能体选择的动作,向智能体反馈奖励 \(r_{t+1}\)
通过合理的学习算法,智能体将在这样的问题设置下,成功学到一个在状态 \(s_t\) 选择动作 \(a_t\) 的策略 \(\pi (s_t) = a_t\)。
QLearning 算法 ¶
Q-Learning 是一个值迭代(Value Iteration)算法。
与策略迭代(Policy Iteration)算法不同,值迭代算法会计算每个”状态“或是”状态-动作“的值(Value)或是效用(Utility),然后在执行动作的时候,会设法最大化这个值。
因此,对每个状态值的准确估计,是值迭代算法的核心。
通常会考虑最大化动作的长期奖励,即不仅考虑当前动作带来的奖励,还会考虑动作长远的奖励。
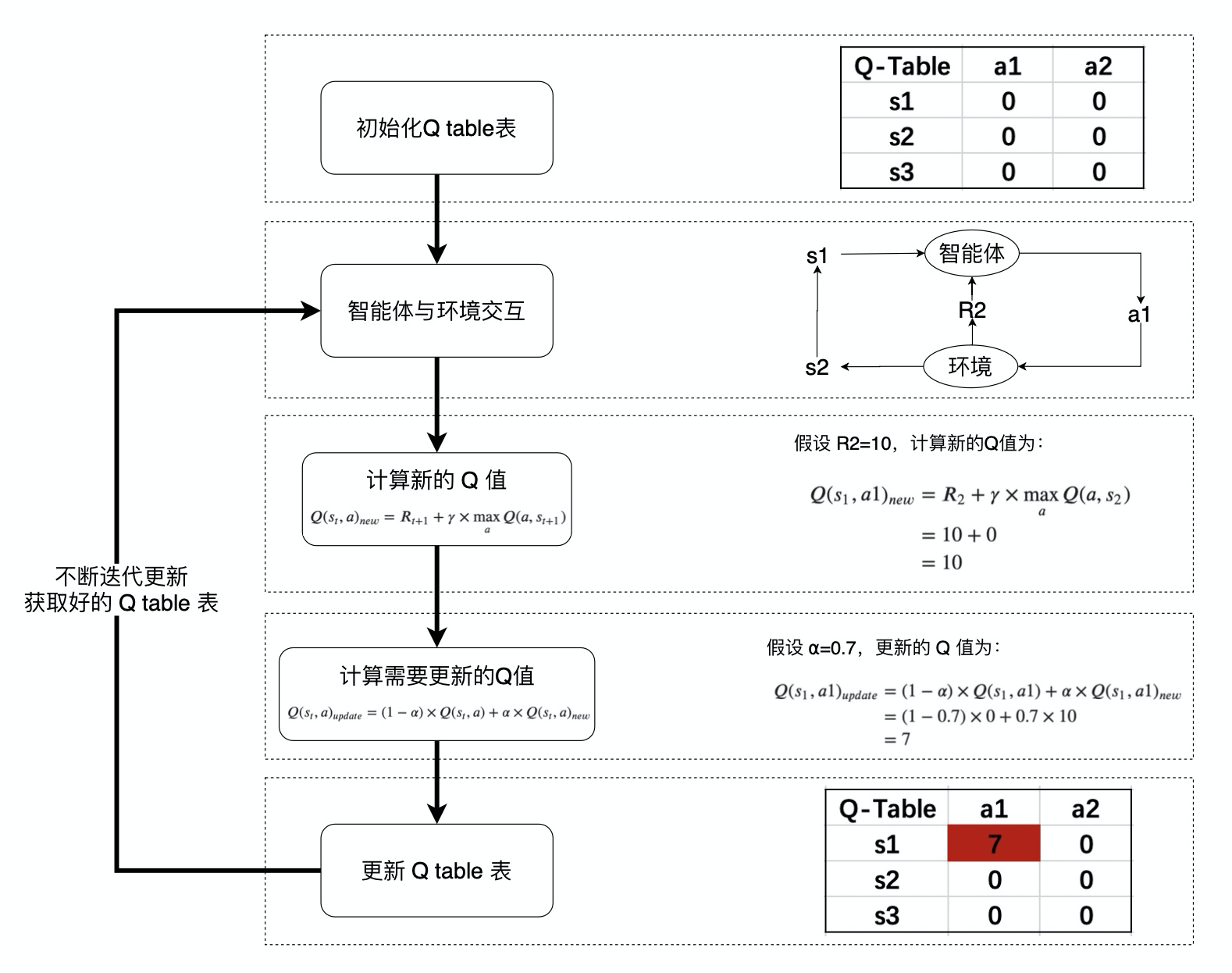
Q 值的计算与迭代 ¶
Q-learning 算法将状态(state)和动作(action)构建成一张 Q_table 表来存储 Q 值,Q 表的行代表状态(state
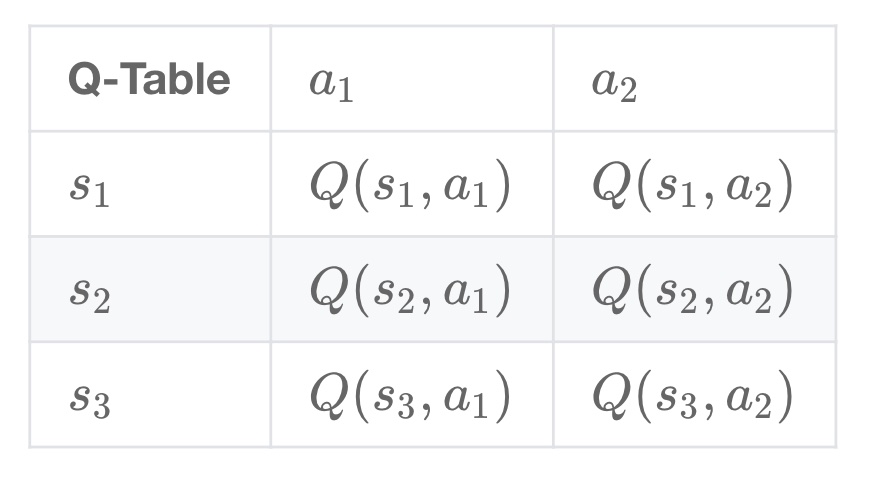
在 Q-Learning 算法中,将这个长期奖励记为 Q 值,其中会考虑每个 ”状态 - 动作“ 的 Q 值,具体而言,它的计算公式为:
也就是对于当前的“状态 - 动作” \((s_{t},a)\),考虑执行动作 \(a\) 后环境奖励 \(R_{t+1}\),以及执行动作 \(a\) 到达 \(s_{t+1}\) 后,执行任意动作能够获得的最大的 Q 值 \(\max_a Q(a,s_{t+1})\),\(\gamma\) 为折扣因子。
计算得到新的 Q 值之后,一般会使用更为保守地更新 Q 表的方法,即引入松弛变量 \(alpha\) ,按如下的公式进行更新,使得 Q 表的迭代变化更为平缓。
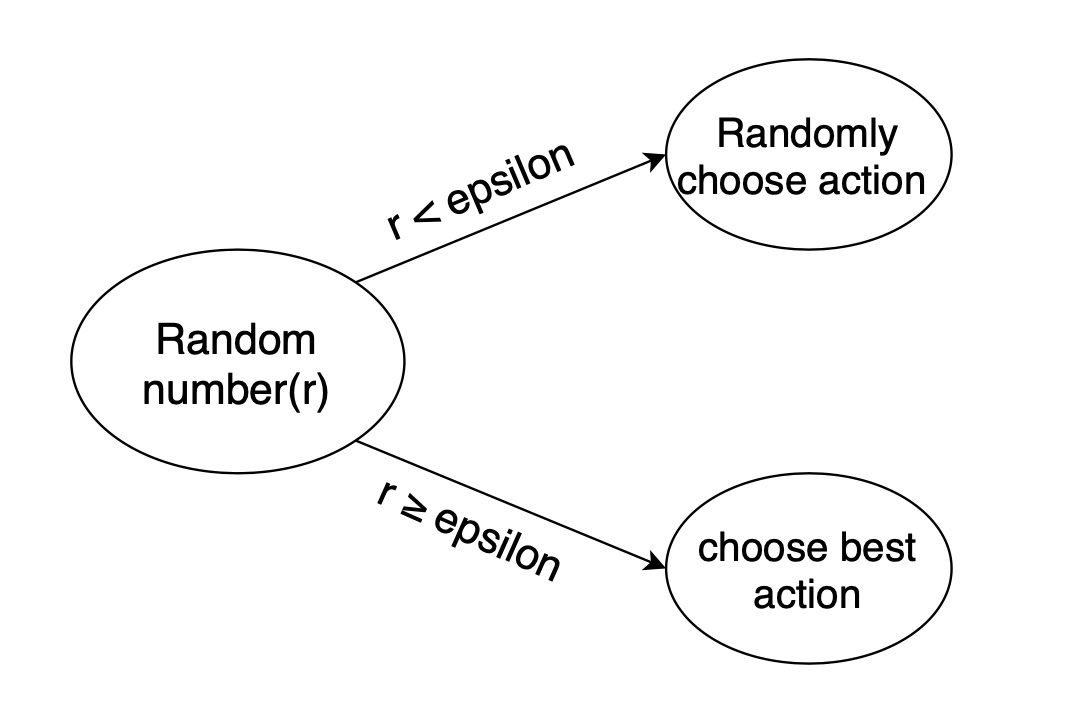
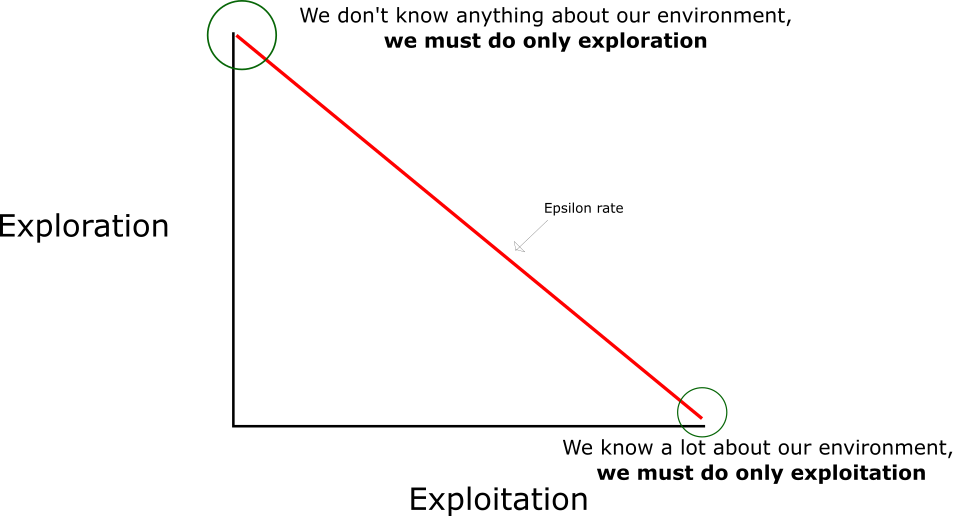
机器人动作的选择 ¶
在强化学习中,探索 - 利用 问题是非常重要的问题。
具体来说,根据上面的定义,会尽可能地让机器人在每次选择最优的决策,来最大化长期奖励。
但是这样做有如下的弊端:
1. 在初步的学习中,Q 值是不准确的,如果在这个时候都按照 Q 值来选择,那么会造成错误。 2. 学习一段时间后,机器人的路线会相对固定,则机器人无法对环境进行有效的探索。
因此需要一种办法,来解决如上的问题,增加机器人的探索。
通常会使用 epsilon-greedy 算法: 1. 在机器人选择动作的时候,以一部分的概率随机选择动作,以一部分的概率按照最优的 Q 值选择动作。 2. 同时,这个选择随机动作的概率应当随着训练的过程逐步减小。
Q-Learning 算法的学习过程 ¶
Robot 类 ¶
在本作业中提供了 QRobot 类,其中实现了 Q 表迭代和机器人动作的选择策略,可通过 from QRobot import QRobot 导入使用。
QRobot 类的核心成员方法
- sense_state():获取当前机器人所处位置
return:机器人所处的位置坐标,如: (0, 0)
- current_state_valid_actions():获取当前机器人可以合法移动的动作
return:由当前合法动作组成的列表,如: ['u','r']
- train_update():以训练状态,根据 QLearning 算法策略执行动作
return:当前选择的动作,以及执行当前动作获得的回报 , 如: 'u', -1
- test_update():以测试状态,根据 QLearning 算法策略执行动作
return:当前选择的动作,以及执行当前动作获得的回报 , 如:'u', -1
- reset()
return:重置机器人在迷宫中的位置
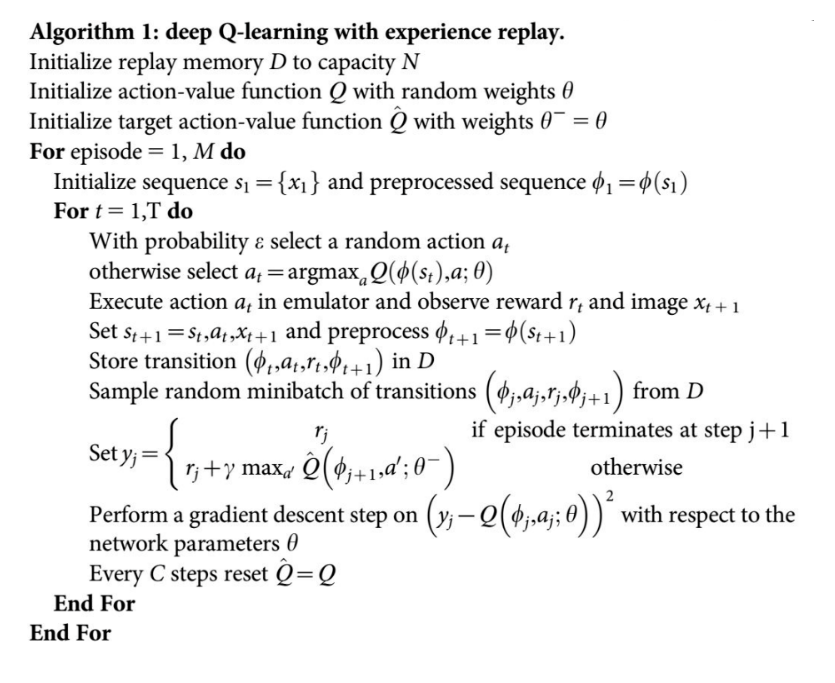
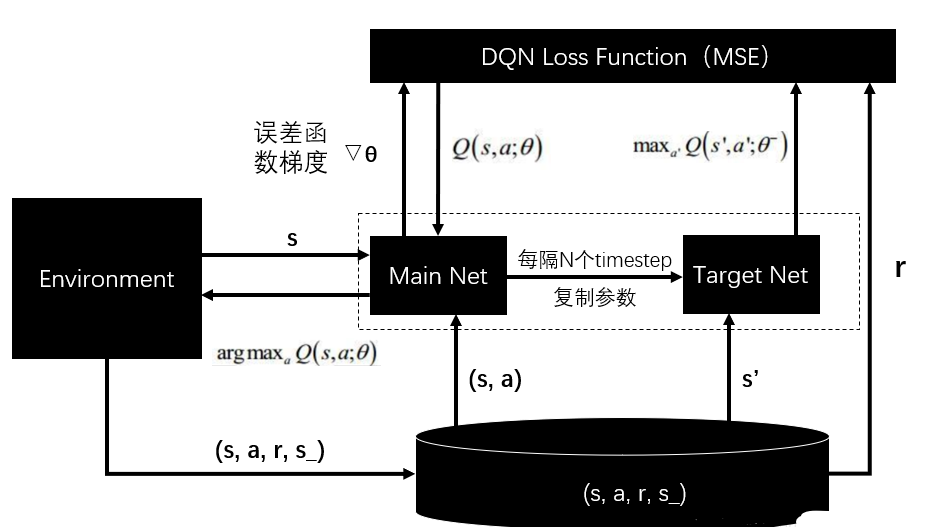
DQN 算法介绍 ¶
强化学习是一个反复迭代的过程,每一次迭代要解决两个问题:给定一个策略求值函数,和根据值函数来更新策略。而 DQN 算法使用神经网络来近似值函数。( DQN 论文地址 )
- DQN 算法流程
- DQN 算法框架图
完成 DQN 算法 ¶
ReplayDataSet 类的核心成员方法
- add(self, state, action_index, reward, next_state, is_terminal) 添加一条训练数据
state: 当前机器人位置
action_index: 选择执行动作的索引
reward: 执行动作获得的回报
next_state:执行动作后机器人的位置
is_terminal:机器人是否到达了终止节点(到达终点或者撞墙)
- random_sample(self, batch_size):从数据集中随机抽取固定 batch_size 的数据
batch_size: 整数,不允许超过数据集中数据的个数
- build_full_view(self, maze):开启金手指,获取全图视野
maze: 以 Maze 类实例化的对象
实现目标 ¶
- 深度优先搜索(DFS)算法:
- 利用栈结构存储路径节点,从起点开始逐步探索迷宫,记录访问过的位置以避免重复访问。
-
当到达目标点时,利用回溯算法生成完整路径。
-
强化学习(DQN)算法:
- 初始化 Q-learning 网络,用于学习状态与动作之间的 Q 值。
- 通过训练阶段,机器人不断尝试不同路径,并根据奖励函数调整策略。
-
使用贪心策略(epsilon-greedy)平衡探索与利用,最终找到最优路径。
-
奖励函数设计:
hit_wall: 墙壁碰撞,奖励为正值,惩罚机器人错误动作。destination: 到达目标点,给予较大的负奖励,鼓励机器人优化路径。default: 每一步的奖励设为较小的正值,用于保持路径的连续性。
实验代码 ¶
1. 深度优先搜索算法¶
核心代码实现如下:
def my_search(maze):
"""
深度优先搜索算法
:param maze: 迷宫对象
:return :到达目标点的路径 如:["u","u","r",...]
"""
path = []
stack = [] # 创建⼀个空的栈
start = maze.sense_robot()
root = SearchTree(loc=start)
stack = [root] # 根节点压⼊栈中
h, w, _ = maze.maze_data.shape
is_visit_m = np.zeros((h, w), dtype=np.int) # 标记迷宫的各个位置是否被访问过
while stack:
current_node = stack.pop() # 从栈中取出当前节点
is_visit_m[current_node.loc] = 1 # 标记当前节点位置已访问
# 到达⽬标点
if current_node.loc == maze.destination:
path = back_propagation(current_node)
break
# 拓展叶节点
if current_node.is_leaf():
expand(maze, is_visit_m, current_node)
# 将⼦节点⼊栈(逆序)
for child in reversed(current_node.children):
stack.append(child)
return path
测试代码如下
maze = Maze(maze_size=10) # 从文件生成迷宫
path_2 = my_search(maze)
print("搜索出的路径:", path_2)
for action in path_2:
maze.move_robot(action)
if maze.sense_robot() == maze.destination:
print("恭喜你,到达了目标点")
print(maze)
结果如下所示

2. 强化学习训练机器人¶
核心代码实现如下:
class Robot(TorchRobot):
def train(self):
"""
训练机器人,直到能够成功走出迷宫
"""
while True:
self._learn(batch=len(self.memory))
success = False
self.reset()
for _ in range(self.maze.maze_size ** 2):
a, r = self.test_update()
if r == self.maze.reward["destination"]:
return
def test_update(self):
"""
测试阶段,基于 Q 值选择最佳路径
"""
state = np.array(self.sense_state(), dtype=np.int16)
action = self._choose_best_action(state)
reward = self.maze.move_robot(action)
return action, reward
def _choose_best_action(self, state):
"""
选择当前状态下的最优动作
"""
state = torch.from_numpy(state).float().to(self.device)
q_values = self.eval_model(state)
self.eval_model.eval()
with torch.no_grad():
best_action_index = np.argmin(q_values)
return self.valid_action[best_action_index]
实验结果 ¶

-
深度优先搜索(DFS)结果:
-
路径规划成功,机器人能够找到从起点到终点的路径。
- 搜索效率较低,路径不一定是最短路径。

-
强化学习(DQN)结果:
-
机器人通过训练能够成功找到从起点到终点的最优路径。
- 随着训练的进行,机器人找到的路径逐渐缩短,效率提高。

对比分析¶
| 算法 | 优点 | 缺点 |
|---|---|---|
| 深度优先搜索 | 实现简单,适用于小规模迷宫 | 搜索效率低,路径不一定最优 |
| 强化学习(DQN) | 能够通过训练找到最优路径,适应复杂动态环境 | 初始训练成本高,对超参数敏感 |
结论¶
- 深度优先搜索适用于小规模迷宫环境,算法实现简单,但对复杂迷宫不够高效。
- 深度强化学习(DQN)算法能够通过训练找到最优路径,且适用于复杂迷宫环境,但需要较多训练时间。
- 实验验证了强化学习在路径规划领域的潜力,同时也展示了传统算法在特定场景中的优势。
改进方向¶
- 优化强化学习的超参数,如学习率、奖励函数权重。
- 将深度优先搜索与强化学习结合,利用传统算法指导初始训练。
- 扩展迷宫环境的复杂性,测试算法在动态迷宫中的性能。
附录 ¶
Main.py¶
# 导入相关包
import os
import random
import numpy as np
from Maze import Maze
from Runner import Runner
from QRobot import QRobot
from ReplayDataSet import ReplayDataSet
from torch_py.MinDQNRobot import MinDQNRobot as TorchRobot # PyTorch版本
from keras_py.MinDQNRobot import MinDQNRobot as KerasRobot # Keras版本
import matplotlib.pyplot as plt
import numpy as np
# 机器人移动方向
move_map = {
'u': (-1, 0), # up
'r': (0, +1), # right
'd': (+1, 0), # down
'l': (0, -1), # left
}
# 迷宫路径搜索树
class SearchTree(object):
def __init__(self, loc=(), action='', parent=None):
"""
初始化搜索树节点对象
:param loc: 新节点的机器人所处位置
:param action: 新节点的对应的移动方向
:param parent: 新节点的父辈节点
"""
self.loc = loc # 当前节点位置
self.to_this_action = action # 到达当前节点的动作
self.parent = parent # 当前节点的父节点
self.children = [] # 当前节点的子节点
def add_child(self, child):
"""
添加子节点
:param child:待添加的子节点
"""
self.children.append(child)
def is_leaf(self):
"""
判断当前节点是否是叶子节点
"""
return len(self.children) == 0
def expand(maze, is_visit_m, node):
"""
拓展叶子节点,即为当前的叶子节点添加执行合法动作后到达的子节点
:param maze: 迷宫对象
:param is_visit_m: 记录迷宫每个位置是否访问的矩阵
:param node: 待拓展的叶子节点
"""
can_move = maze.can_move_actions(node.loc)
for a in can_move:
new_loc = tuple(node.loc[i] + move_map[a][i] for i in range(2))
if not is_visit_m[new_loc]:
child = SearchTree(loc=new_loc, action=a, parent=node)
node.add_child(child)
def back_propagation(node):
"""
回溯并记录节点路径
:param node: 待回溯节点
:return: 回溯路径
"""
path = []
while node.parent is not None:
path.insert(0, node.to_this_action)
node = node.parent
return path
def my_search(maze):
"""
深度优先搜索算法
:param maze: 迷宫对象
:return :到达目标点的路径 如:["u","u","r",...]
"""
path = []
# -----------------请实现你的算法代码--------------------------------------
stack = [] # 创建⼀个空的栈
start = maze.sense_robot()
root = SearchTree(loc=start)
stack = [root] # 根节点压⼊栈中
h, w, _ = maze.maze_data.shape
is_visit_m = np.zeros((h, w), dtype=np.int) # 标记迷宫的各个位置是否被访问过
while stack:
current_node = stack.pop() #从栈中取出当前节点
is_visit_m[current_node.loc] = 1 # 标记当前节点位置已访问
# 到达⽬标点
if current_node.loc == maze.destination:
path = back_propagation(current_node)
break
# 拓展叶节点
if current_node.is_leaf():
expand(maze, is_visit_m, current_node)
# 将⼦节点⼊栈(逆序)
for child in reversed(current_node.children):
stack.append(child)
# -----------------------------------------------------------------------
return path
import os
import random
import numpy as np
import torch
from QRobot import QRobot
from ReplayDataSet import ReplayDataSet
from torch_py.MinDQNRobot import MinDQNRobot as TorchRobot # PyTorch版本
import matplotlib.pyplot as plt
class Robot(TorchRobot):
def __init__(self, maze):
"""
初始化 Robot 类
:param maze:迷宫对象
"""
super(Robot, self).__init__(maze)
maze.set_reward(reward={
"hit_wall": 10.,
"destination": -maze.maze_size ** 2 *10,
"default": 1.,
})
self.maze = maze
self.epsilon = 0
"""开启金手指,获取全图视野"""
self.memory.build_full_view(maze=maze)
self.train()
def train(self):
# 训练,直到能走出这个迷宫
while True:
self._learn(batch=len(self.memory) )
success = False
self.reset()
for _ in range(self.maze.maze_size ** 2 ):
a, r = self.test_update()
if r == self.maze.reward["destination"]:
return
def train_update(self):
state = self.sense_state()
action = self._choose_action(state)
reward = self.maze.move_robot(action)
return action, reward
def test_update(self):
# 获取当前状态
state = np.array(self.sense_state(), dtype=np.int16)
# 根据Q表选择最佳动作
action = self._choose_best_action(state)
# 执行动作并获得奖励
reward = self.maze.move_robot(action)
# 返回动作和奖励
return action, reward
def _choose_best_action(self, state):
state = torch.from_numpy(state).float().to(self.device)
q_values = self.eval_model(state) # 假设这个方法返回给定状态下所有动作的Q值
self.eval_model.eval()
with torch.no_grad():
best_action_index = np.argmin(q_values)
return self.valid_action[best_action_index] # 假设valid_actions是所有可能动作的列表