机器人建模 ¶
约 1689 个字 预计阅读时间 7 分钟
绪论 ¶
常见机械臂几何结构 ¶

空间描述与变换 ¶
坐标系与向量 ¶
笛卡尔直角坐标系
- 交于原点的三条不共面的数轴(常称 x 轴、y 轴和 z 轴)构成空间的仿射坐标系
- 三条数轴(主轴)上度量单位相等的仿射坐标系称为空间笛卡尔坐标系
- 下面所有坐标系均采用直角右手坐标系
向量的表示
向量 \(r_{O_AD}\),将它分别向 \(\hat{X}_A, \hat{Y}_A, \hat{Z}_A\) 作投影,得到 3 个向量 \(d_x \hat{X}_A, d_y \hat{Y}_A, d_z \hat{Z}_A\)
\(r_{O,D} = d_x \hat{X}_A + d_y \hat{Y}_A + d_z \hat{Z}_A = \left( \hat{X}_A \quad \hat{Y}_A \quad \hat{Z}_A \right) \begin{pmatrix} d_x \\ d_y \\ d_z \end{pmatrix}\)
简洁表达 \(^A D = \begin{pmatrix} d_x \\ d_y \\ d_z \end{pmatrix}\)
内积结果是标量
两个向量 \(r_{OP}\) 和 \(r_{OQ}\) 的点乘(内积)可按下式计算:
两个向量 \(\vec{a}\) 和 \(\vec{b}\) 的叉乘结果是一个新向量 \(\vec{c}\):
方向遵循右手定则,垂直于这两个向量所在的平面。
简单计算方法 :
- 把 \(\vec{a}\) 和 \(\vec{b}\) 写成下面的矩阵形式
- 去掉第一列和最后一列,剩下的 3 个 2x2 的矩阵(每次滑动 1 格子
) ,计算行列式即可
点和刚体的描述 ¶
点
刚体
在 \(\{A\}\) 中表示出 \(\{B\}\) 的姿态:
| 表示方法 | 核心思想 | 公式 | 缺点 |
|---|---|---|---|
| 旋转矩阵 | 使用 3x3 矩阵表示三维旋转 | \(\mathbf{R} = \begin{pmatrix} r_{11} & r_{12} & r_{13} \\ r_{21} & r_{22} & r_{23} \\ r_{31} & r_{32} & r_{33} \end{pmatrix}\) | 1. 参数多(9 个 2. 难以直观理解旋转过程 3. 插值复杂 |
| 欧拉角 | 将旋转分解为绕三个正交轴的旋转 | \((\alpha, \beta, \gamma)\),常用 ZYX 顺序:\(\mathbf{R} = R_z(\alpha) R_y(\beta) R_x(\gamma)\) | 易于理解和可视化 但是 1. 万向锁问题(奇异性) 2. 不同顺序定义不唯一 3. 插值不平滑 |
| 等效轴角 | 用一个单位轴和一个旋转角表示旋转 | \((\mathbf{k}, \theta)\),其中 \(\mathbf{k} = (k_x, k_y, k_z)\) 为单位向量,\(\theta\) 为旋转角。旋转矩阵为: \(\mathbf{R} = \mathbf{I} + \sin\theta \mathbf{K} + (1 - \cos\theta) \mathbf{K}^2\), 其中 \(\mathbf{K} = \begin{pmatrix} 0 & -k_z & k_y \\ k_z & 0 & -k_x \\ -k_y & k_x & 0 \end{pmatrix}\) | 1. 无法直接表示 0° 旋转(需特殊处理) 2. 插值时需注意旋转角的周期性 |
| 四元数 | 使用四维超复数表示旋转 | \(q = \eta + i\varepsilon_1 + j\varepsilon_2 + k\varepsilon_3\),其中 \(\eta^2 + \varepsilon_1^2 + \varepsilon_2^2 + \varepsilon_3^2 = 1\)。 | 参数最少(4 个)避免了奇异性问题 1. 较难直观理解 2. 计算稍复杂(但比旋转矩阵简单) |
机器人运动学 ¶
- 使两个刚体直接接触而又能产生一定相对运动的联接称为运动副 ,机器人的运动副也称关节,连杆即指由关节所联的刚体
- 本课程中的关节仅限转动副和移动副
- 串联机构:多个连杆通过关节以串联形式连接成首尾不封闭的机械结构
Note
为了确定末端执行器在 3 维空间的位置和姿态,串联机器人至少需要 6 个关节
改进 D-H 参数 ¶
确定坐标系的方法
- 第 1 步:确定 \(Z_i\) 轴。基本原则是:\(Z_i\) 轴沿关节 \(i\) 的轴向。
- 第 2 步:确定原点 \(O_i\)。基本原则是:\(O_i\) 在过 \(Z_i\) 和 \(Z_{i+1}\) 轴的公法线上。
- 第 3 步:确定 \(X_i\) 轴。基本原则是:\(X\) 轴沿过 \(Z_i\) 和 \(Z_{i+1}\) 轴的公法线方向,从 \(Z_i\) 指向 \(Z_{i+1}\)。
- 第 4 步:确定 \(Y_i\) 轴。基本原则是:\(Y_i = Z_i \times X_i\),使坐标系为右手坐标系。
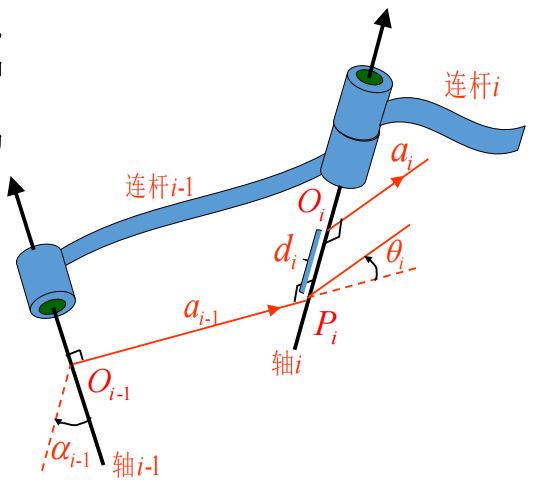
DH 参数的定义
- 杆件长度 \(a_i\),定义为从 \(Z_{i-1}\) 到 \(Z_i\) 的距离,沿 \(X_{i-1}\) 轴指向为正。
- 杆件扭角 \(\alpha_i\),定义为从 \(Z_{i-1}\) 到 \(Z_i\) 的转角。绕 \(X_{i-1}\) 轴正向转动为正。
- 关节距离 \(d_i\),定义为从 \(X_{i-1}\) 到 \(X_i\) 的距离,沿 \(Z_i\) 轴指向为正。
- 关节转角 \(\theta_i\) 定义为从 \(X_{i-1}\) 到 \(X_i\) 的转角,绕 \(Z_i\) 轴正向转动为正。
正运动学 ¶
相邻连杆的坐标系变换
{i-1} 经四步变换成为 {i}:
- 沿联体 x 轴平移 \(a_{i-1}\)
- 沿联体 x 轴旋转 \(\alpha_{i-1}\)
- 沿联体 z 轴平移 \(d_i\)
- 沿联体 z 轴旋转 \(\theta_i\)
经过矩阵乘法后,得到的结果为:
小测 ¶
1、证明,\(R(a \times b) = (Ra) \times (Rb)\),其中 \(R\) 是旋转矩阵,\(a, b \in \mathbb{R}^3\)。¶
定义法证明补全
- 首先,我们知道向量叉积 \(a \times b\) 的性质是:
$$ det(x, a, b) = langle x, a times b rangle quad text{对于任意 } x in mathbb{R}^3。 $$
$$ det(x, a, b) = begin{vmatrix} x_1 & x_2 & x_3 \ a_1 & a_2 & a_3 \ b_1 & b_2 & b_3 end{vmatrix} $$
$$ langle x, a times b rangle = begin{bmatrix} x_1 & x_2 & x_3 end{bmatrix} begin{bmatrix} a_2b_3 - a_3b_2 \ a_3b_1 - a_1b_3 \ a_1b_2 - a_2b_1 end{bmatrix} = begin{vmatrix} x_1 & x_2 & x_3 \ a_1 & a_2 & a_3 \ b_1 & b_2 & b_3 end{vmatrix} $$
-
现在,考虑 \(R \in SO(3)\):
-
由于 \(R\) 是旋转矩阵,满足:
\[ R^T = R^{-1}。 \] -
因此,有:
$$ langle x, R(a times b) rangle = langle R^T x, a times b rangle = det(R^{-1}x, a, b)。 $$
- 又因为:
$$ det(R) = 1, $$
所以:
$$ det(R)det(R^{-1}x, a, b) = det(x, Ra, Rb) = langle x, Ra times Rb rangle。 $$
- 由于对于任意 \(x \in \mathbb{R}^3\) 都成立:
$$ langle x, R(a times b) rangle = langle x, Ra times Rb rangle, $$
根据内积的性质,可得:
$$ R(a times b) = (Ra) times (Rb)。 $$