空中机器人 ¶
约 3052 个字 预计阅读时间 12 分钟
基本知识 ¶
定义 : 拥有自制和自主能力
分类 ¶
固定翼 - 机体结构、航电系统、动力系统、起降系统、地面控制站
旋翼
扑翼
气囊
伞翼
应用 ¶
- 无人机派送
- 消费级无人机
导航 ¶
定义:将运载体从起始点引导到目的地的技术或方法称为导航 (Navigation)
导航三大问题
- 我在那里
- 我要去哪里
- 我如何去
定位的本质是状态估计问题
飞行器的动态模型 ¶
坐标系与姿态转换 ¶
常见飞行器可以抽象为一个刚体。描述任意时刻的空间运动需要六个自由度:三个质心运动和三个角运动
地球中心坐标系(ECEF)
ECEF 坐标系与地球固联,位置在地球质心
WGS-84 坐标系
当前 GPS 所用的坐标系(地球是一个椭圆)
为什么不用 GPS 的海拔信息
GPS 的海拔高度不准
NED 坐标系
PID 技术 ¶
观看视频:PID 讲解
\(K_P\) 越大,控制系统的响应速度越大,但产生的震荡也越严重
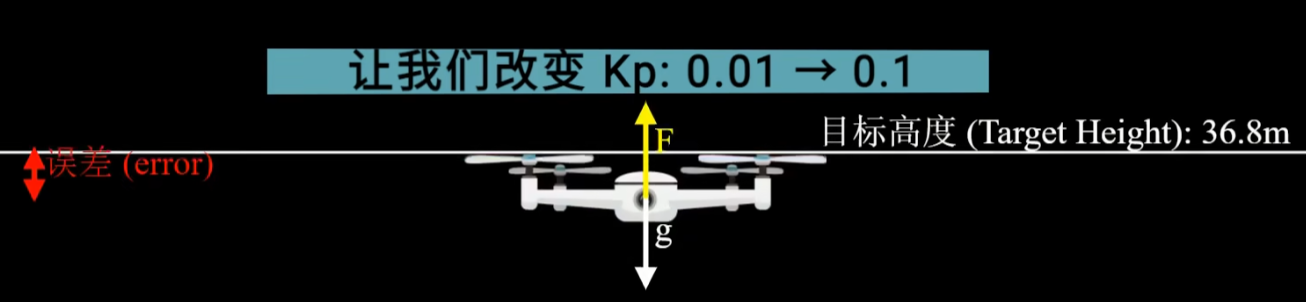
\(K_d\) 减缓震荡,但不能过大,否则会过冲
\(\frac{d(e)}{dt} = v\),微分算法可以对无人机的速度发生响应
\(K_i\), 减小与目标位置之间的误差
轨迹规划 ¶
深度优先(DFS)¶
队列:先进后出
广度优先(BFS)¶
是没有权重的 Dijkstra 算法
队列:先进先出
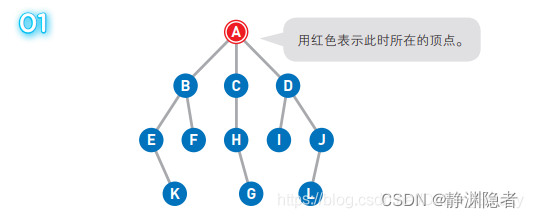
图示:
A 为起点,G 为终点。一开始我们在起点 A 上,此时并不知道 G 在哪里。
将可以从 A 直达的三个顶点 B、C、D 设为下一步的候补顶点。
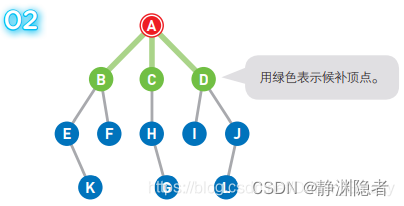
从候补顶点中选出一个顶点。优先选择最早成为候补的那个顶点,如果多个顶点同时成为候补,那么可以随意选择其中一个。
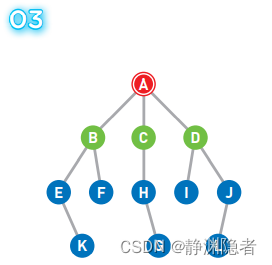
假设选择 B 点为先进去的,此时的队列 [B C D] 变为 [C D]
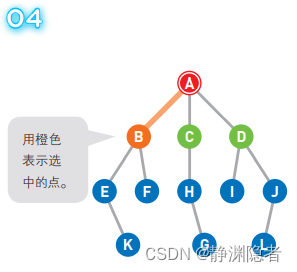
移动到选中的顶点 B 上。此时我们在 B 上, 所以 B 变为红色,同时将已经搜索过的顶点变为橙色。
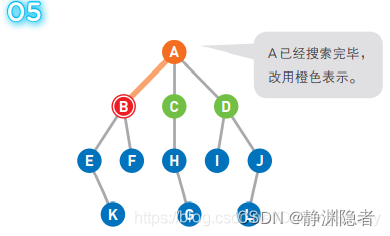
将可以从 B 直达的两个顶点 E 和 F 设为候补顶点并加入队列,变为 [C D E F]
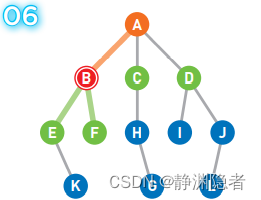
此时,最早成为候补顶点的是 C 和 D,我们选择了左边的顶点 C。
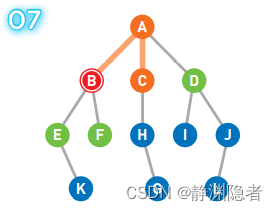
移动到选中的顶点 C 上。
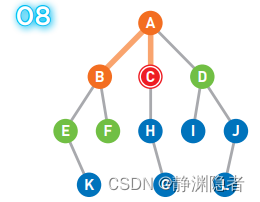
将可以从 C 直达的顶点 H 设为候补顶点,并将 C 移除队列,此时的队列 [D E F H]。
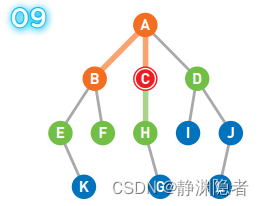
重复上述操作直到到达终点,或者所有的顶点都被遍历为止。
Dijkstra 算法 ¶
- 每次从未标记的节点中选取距离出发点最近的节点,标记,收录到最优路径集合中
- 计算刚加入节点 A 的邻近节点 B 的距离,若 A 的距离 +A 到 B 的距离小于 B 的距离,则更新 B 的距离
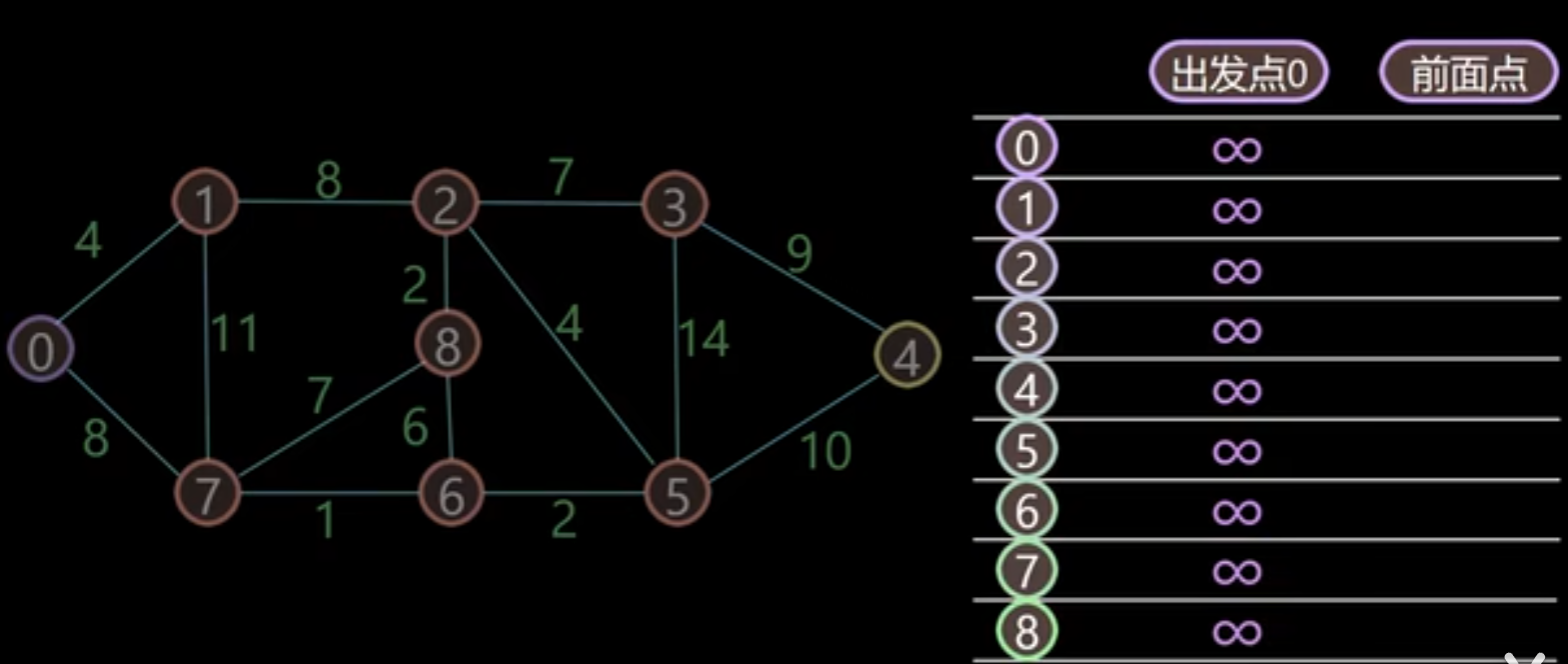
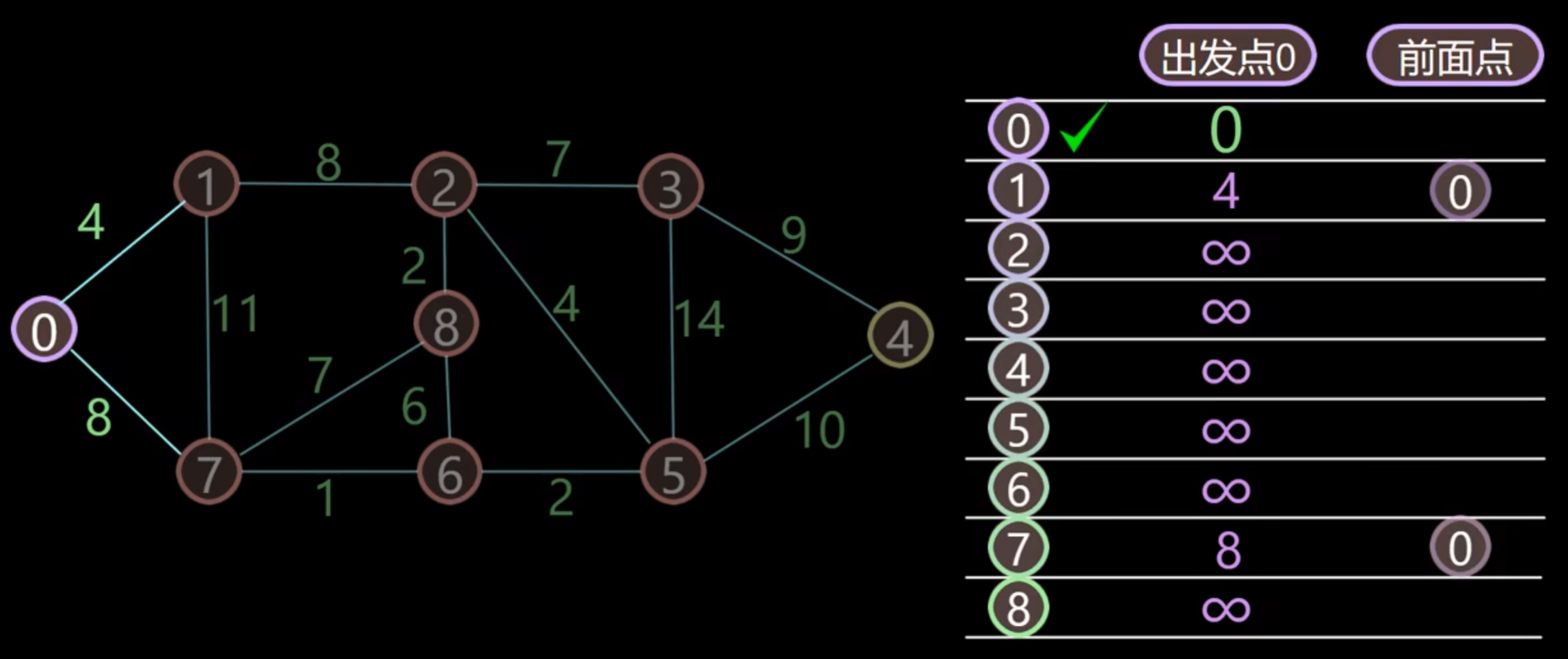
例题如下
首先用表格记录该店距离前面点的初始距离,起始的值都为无穷大,前面点都为空
首先节点 0 到 0,距离为 0,找到距离最小的值,为 0,加入已搜索节点,并标注前面点为 0
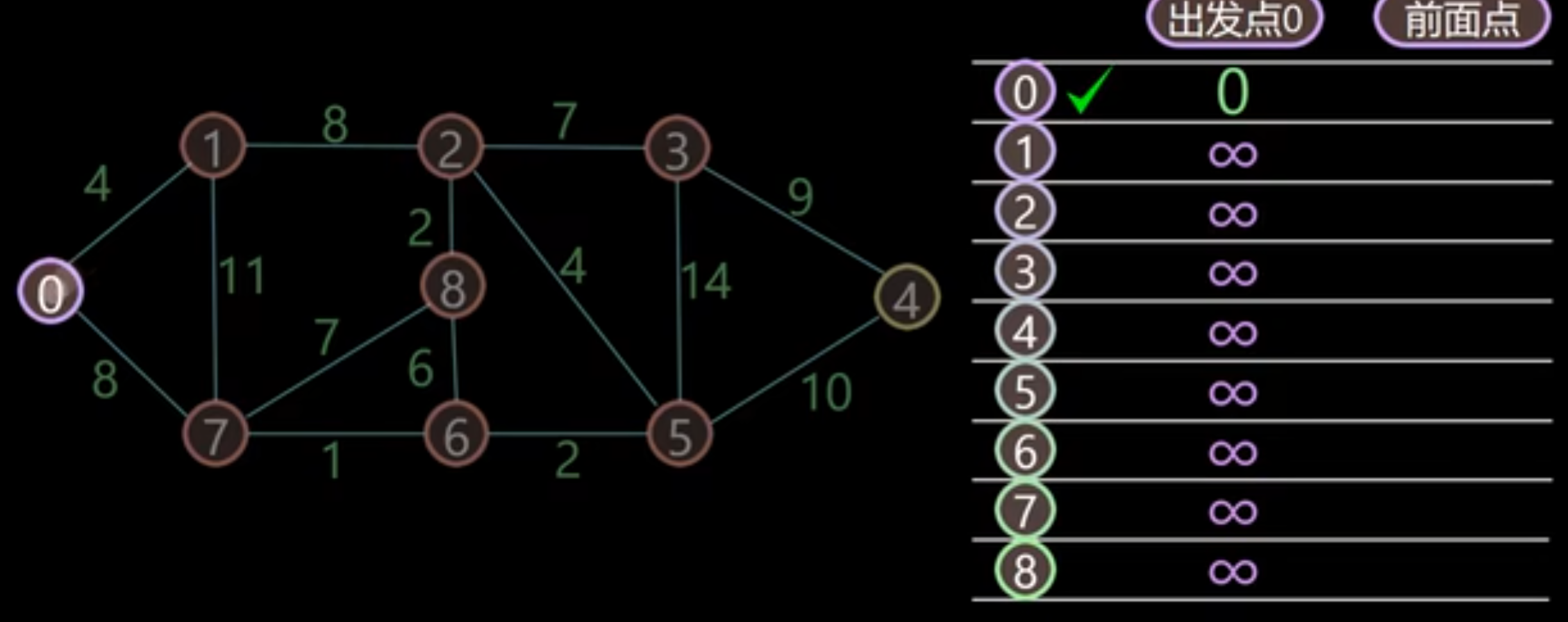
更新节点 0 附件的节点 1 和 7 的距离
在未被加入已搜索节点的里面找到距离出发点最小的点,是 1 点,将其加入已搜索点,并跟新 1 节点周围的点的距离。
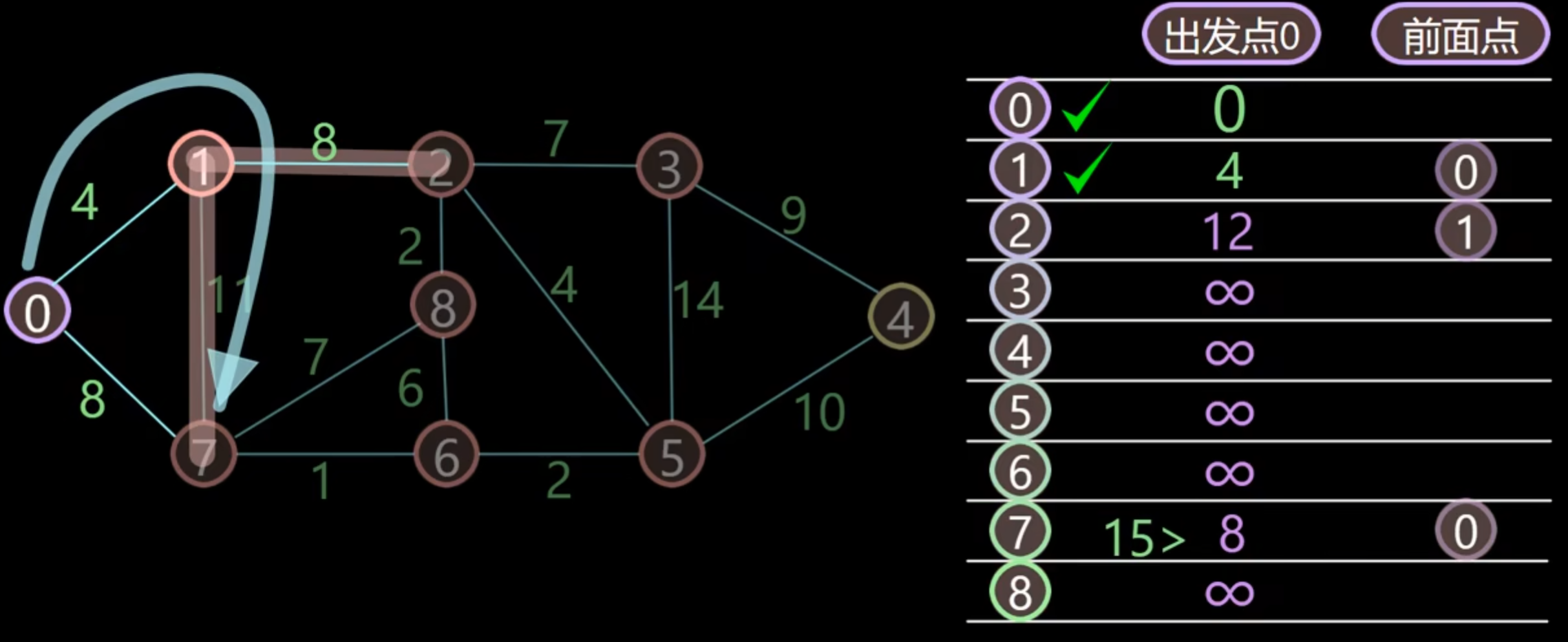
依次类推,直到所有点都被搜索完成
优点:
- 准确性: 总是能找到最短路径。
- 简单性: 实现相对简单。
缺点:
- 效率较低: 算法需要遍历图中的大多数节点,可能导致较高的计算成本。
- 实时性差: 在动态环境中可能不适用,因为它不能快速适应环境的变化
A* 算法 ¶
与 Dijkstra 的区别:是加了猜测 H 函数的 Dijkstra 算法
- Dijkstra: G(n)
- A*:F(n)=G(n)+H(n)
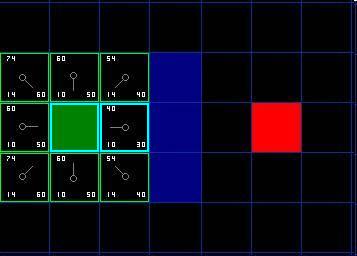
搜索区域 (The Search Area) ¶
以题目进行解释,我们假设某人要从 A 点移动到 B 点,但是这两点之间被一堵墙隔开。如图 1 ,绿色是 A ,红色是 B ,中间蓝色是墙。
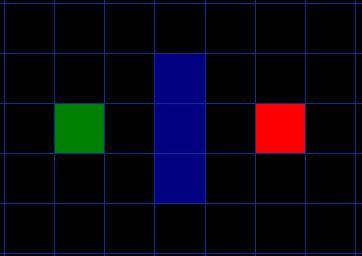
格子的状态分为可走 (walkalbe) 和不可走 (unwalkable)
开始搜索 (Starting the Search) ¶
- 从起点 A 开始,并把它就加入到一个由方格组成的 open list( 开放列表 ) 中。 Open list 里的格子是路径可能会是沿途经过的,也有可能不经过。基本上 open list 是一个待检查的方格列表。
- 查看与起点 A 相邻的方格 ( 忽略其中 unwalk 的方格 ) ,把其中可走的 (walkable) 或可到达的 (reachable) 方格也加入到 open list 中。把起点 A 设置为这些方格的父亲 (parent node 或 parent square) 。
- 把 A 从 open list 中移除,加入到 close list( 封闭列表 ) 中, close list 中的每个方格都是现在不需要再关注的。
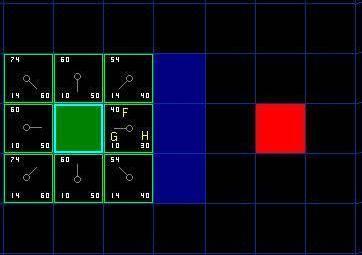
如下图所示,深绿色的方格为起点,它的外框是亮蓝色,表示该方格被加入到了 close list 。与它相邻的黑色方格是需要被检查的,他们的外框是亮绿色。每个黑方格都有一个灰色的指针指向他们的父节点,这里是起点 A 。

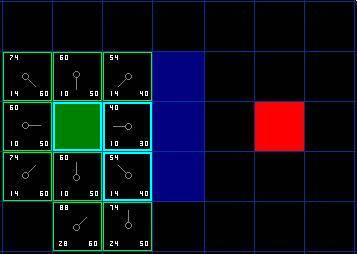
路径排序 (Path Sorting) ¶
对每个节点,在计算时同时考虑两项代价指标:当前节点与起始点的距离,以及当前节点与目标点的距离:F = G + H
- 欧式距离:G = 从起点 A 移动到指定方格的移动代价,沿着到达该方格而生成的路径。
- \(G = \sqrt{(x_1 - x_2)^2 +(y_1 - y_2)^2}\)
- 曼哈顿距离:H = 从指定的方格移动到终点 B 的估算成本。
- \(H = |x_1 - x_2| + |y_1 - y_2|\)
- 注意,H 函数的选取要满足估算成本小于实际成本
计算起始点相邻方格的 F、G、H 的值,分别记录在左上角,左下角和右下角
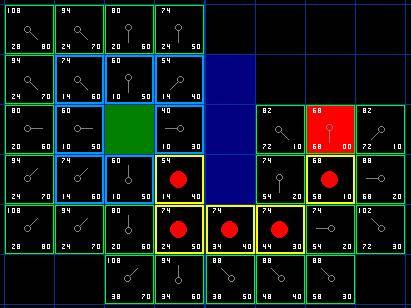
继续搜索 (Continuing the Search) ¶
为了继续搜索,我们从 open list 中选择 F 值最小的 ( 方格 ) 节点,然后对所选择的方格作如下操作:
- 把它从 open list 里取出,放到 close list 中。
- 检查所有与它相邻的方格,忽略其中在 close list 中或是不可走 (unwalkable) 的方格 ( 比如墙,水,或是其他非法地形 ) ,如果方格不在 open lsit 中,则把它们加入到 open list 中。把我们选定的方格设置为这些新加入的方格的父亲。
- 然后计算新加入的方格相对于当前处理方格的 F、G、H 值 ( 注意 G 为累加值 )
- 选取其中 F 值最小的作为下一个待处理的方格。
- 然后继续上面的操作。
- 如果某个相邻的所有方格均已经在 open list 中,则检查所有方格所在的这条路径是否更优,也就是说经由当前方格 ( 我们选中的方格 ) 到达那个方格是否具有更小的 G 值。
- 如果没有,不做任何操作。
- 相反,如果 G 值更小,则把那个方格的父亲设为当前方格 ( 我们选中的方格 ) ,然后重新计算那个方格的 F 值和 G 值。
-
对于上图,在我们最初的 9 个方格中,还有 8 个在 open list 中,起点被放入了 close list 中。在这些方格中,起点右边的格子的 F 值 40 最小,因此我们选择这个方格作为下一个要处理的方格。它的外框用蓝线打亮。
-
首先,我们把它从 open list 移到 close list 中 。然后我们检查与它相邻的方格。它右边的方格是墙壁,我们忽略。它左边的方格是起点,在 close list 中,我们也忽略。其他 4 个相邻的方格均在 open list 中,因此我们需要检查经由这个方格到达那里的路径是否更好,使用 G 值来判定。让我们看看上面的方格。它现在的 G 值为 14 。如果我们经由当前方格到达那里, G 值将会为 20。显然 20 比 14 大,因此这不是最优的路径。
-
当把 4 个已经在 open list 中的相邻方格都检查后,没有发现经由当前方格的更好路径,因此我们不做任何改变。现在我们已经检查了当前方格的所有相邻的方格,并也对他们作了处理,是时候选择下一个待处理的方格了。
-
因此再次遍历我们的 open list ,现在它只有 7 个方格了,我们需要选择 F 值最小的那个。有趣的是,这次有两个方格的 F 值都 54 ,选哪个呢?没什么关系。从速度上考虑,选择最后加入 open list 的方格更快。
-
我们选择起点右下方的方格,如下图所示
-
只有三个方格可以选取,当前处理方格左边的方格,以及新加入的两个方格中。我们检查经由当前方格到达那里是否具有更小的 G 值。没有。因此我们准备从 open list 中选择下一个待处理的方格。
-
以此类推,找到最短路径
JPS 算法 ¶
实验课程 ¶
树莓派密码:
pi
主线任务——设置位置控制器,实现无人机悬停 ¶
线性控制器 ¶
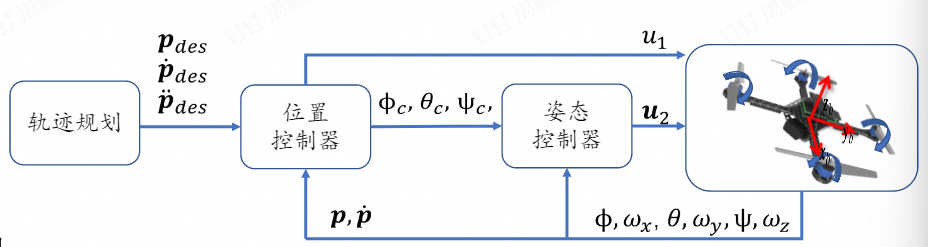
采用串级 PID 控制,内层控制姿态,外层控制位置。
模型构建 ¶
线性化
- 平衡悬停态: \((\phi_0 \sim 0, \theta_0 \sim 0, u_{1,0} \sim mg)\)
牛顿方程:
欧拉角微分:
线性化后
欧拉方程:
PID 控制
位置控制
- 由上述方程可以求出 \(p_{i,c}\)
- 再带入牛顿方程的解的到预期的 \(\phi_c\)、\(\theta_c\) 和 \(u_1\)
- \(\phi_c = \frac{1}{g}(\ddot{p}_{1,c}s\psi - \ddot{p}_{2,c}c\psi)\)
- \(\theta_c = \frac{1}{g}(\ddot{p}_{1,c}c\psi + \ddot{p}_{2,c}s\psi)\)
- \(u_1 = m(g + \ddot{p}_{3,c})\)
姿态控制
PID 控制
模型
代码逻辑 ¶
位置控制器 ¶
输入输出
输入:\(p_des\)、\(\dot{p}_des\)、\(\ddot{p}_des\) 以及当前的 yaw 角
输出:当前的位置\(P_c\),预期的roll、Pitch角
返回:当前的yaw与预期的roll、Pitch计算的新的四元素给姿态控制器
imu.q -> Euler
Euler.yaw P_des -> P_c roll_d pitch_c
yaw pitch_c roll_c -> u.q(输出)