自动化竞赛实训 ¶
约 243 个字 355 行代码 预计阅读时间 5 分钟
机器视觉 ¶
瓶盖颜色检测 ¶
- 图片 HSV 提取
import cv2
import numpy as np
from matplotlib import pyplot as plt
image=cv2.imread('../picture/white.bmp')
HSV=cv2.cvtColor(image,cv2.COLOR_BGR2HSV)
def getpos(event,x,y,flags,param):
if event==cv2.EVENT_LBUTTONDOWN: #定义一个鼠标左键按下去的事件
print(HSV[y,x])
cv2.imshow("imageHSV",HSV)
cv2.imshow('image',image)
cv2.setMouseCallback("imageHSV",getpos)
cv2.waitKey(0)
运行之后,会出现 png和hsv两个图片,点击hsv的位置即可提取该点的值,然后获得该图片的颜色范围
- 颜色识别代码
import cv2
import numpy as np
import os
# 定义颜色范围的字典,使用HSV颜色空间表示
# 利用get_hsv.py获取图片的CSV范围(仅适用于本次lab,图中的white很像blue)
COLOR_RANGES = {
'red': [(0, 100, 100), (10, 255, 255)],
'green': [(60, 190, 150), (70, 220, 255)],
'blue': [(90, 100, 250), (125, 230, 255)],
'yellow': [(30, 226, 187), (35, 238, 255)],
'white':[(0,0,0),(110,80,255)]
}
# 定义函数来检测瓶盖颜色
def detect_cap_color(image):
# 将图片从BGR转换为HSV颜色空间
hsv = cv2.cvtColor(image, cv2.COLOR_BGR2HSV)
for color, (lower_range, upper_range) in COLOR_RANGES.items():
# 转换为numpy数组,定义颜色范围
lower_bound = np.array(lower_range)
upper_bound = np.array(upper_range)
# 创建遮罩,过滤出特定颜色范围的区域
mask = cv2.inRange(hsv, lower_bound, upper_bound)
# 计算遮罩中非零像素的数量,如果大于某个阈值,说明检测到了该颜色
if cv2.countNonZero(mask) > 0:
return color
return 'Unknown'
# 读取指定目录下的所有BMP图像并进行颜色检测
def process_images(directory):
for filename in os.listdir(directory):
if filename.endswith(".bmp"):
# 读取图像
image_path = os.path.join(directory, filename)
image = cv2.imread(image_path)
# 检测颜色
color = detect_cap_color(image)
# 输出结果
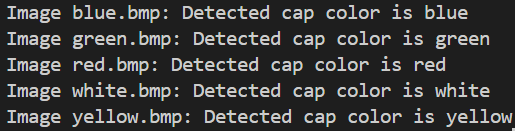
print(f"Image {filename}: Detected cap color is {color}")
# 使用示例
image_directory = '../picture' # 替换为你的BMP图片集的路径
process_images(image_directory)
使用图片
运行结果如下
Note
import cv2
import numpy as np
import os
from tkinter import Tk, Button, Label, Canvas, PhotoImage
from PIL import Image, ImageTk
# 定义颜色范围的字典,使用HSV颜色空间表示
# 利用get_hsv.py获取图片的CSV范围(仅适用于本次lab,图中的white很像blue)
COLOR_RANGES = {
# 颜色名称映射到HSV颜色空间的上下界
'red': [(0, 100, 100), (10, 255, 255)], # 红色范围
'green': [(60, 190, 150), (70, 220, 255)], # 绿色范围
'blue': [(90, 100, 250), (125, 230, 255)], # 蓝色范围
'yellow': [(30, 226, 187), (35, 238, 255)], # 黄色范围
'white': [(0, 0, 0), (110, 80, 255)] # 白色范围
}
# 定义函数来检测瓶盖颜色
def detect_cap_color(image):
# 将图片从BGR转换为HSV颜色空间
hsv = cv2.cvtColor(image, cv2.COLOR_BGR2HSV)
# 遍历颜色范围字典中的每种颜色
for color, (lower_range, upper_range) in COLOR_RANGES.items():
# 转换为numpy数组,定义颜色范围
lower_bound = np.array(lower_range, dtype="uint8")
upper_bound = np.array(upper_range, dtype="uint8")
# 创建遮罩,过滤出特定颜色范围的区域
mask = cv2.inRange(hsv, lower_bound, upper_bound)
# 计算遮罩中非零像素的数量,如果大于某个阈值,说明检测到了该颜色
if cv2.countNonZero(mask) > 0:
return color
return 'Unknown'
# 定义检测图片并显示结果的函数
def detect_and_display():
global image, result_label, canvas, image_label
image_directory = '../picture'
image_paths = [os.path.join(image_directory, f) for f in os.listdir(image_directory) if f.endswith('.bmp')]
for i, image_path in enumerate(image_paths):
image = cv2.imread(image_path)
scale_percent = 30
width = int(image.shape[1] * scale_percent / 100)
height = int(image.shape[0] * scale_percent / 100)
dim = (width, height)
image = cv2.resize(image, dim, interpolation=cv2.INTER_AREA)
# 显示正在检测的图片
img_rgb = cv2.cvtColor(image, cv2.COLOR_BGR2RGB)
img_pil = Image.fromarray(img_rgb)
img_tk = ImageTk.PhotoImage(img_pil)
image_label.config(image=img_tk)
image_label.image = img_tk # 保持引用
color = detect_cap_color(image)
result_label.config(text=f"第 {i+1} 张图片检测到的颜色是: {color}")
root.after(2000)
root.update()
# 创建Tkinter窗口
root = Tk()
root.title("瓶盖颜色检测")
root.geometry("800x600") # 设置窗口大小为800x600
# 创建按钮
button = Button(root, text="检测", command=detect_and_display)
button.pack()
# 创建结果标签
result_label = Label(root, text="")
result_label.pack()
# 创建图片标签
image_label = Label(root)
image_label.pack()
root.mainloop()
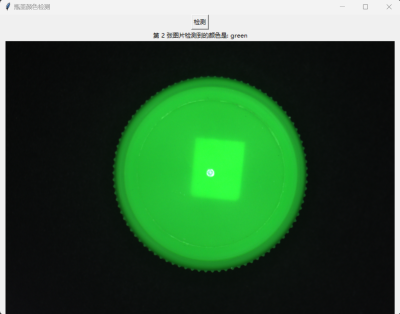
运行结果
梳子缺齿检测 ¶
代码如下
import cv2
import numpy as np
# 读取图片
image_path = '../picture/1.bmp' # 替换为梳子图片路径
image = cv2.imread(image_path, cv2.IMREAD_GRAYSCALE)
# 图像预处理:进行模糊处理和二值化
blur = cv2.GaussianBlur(image, (5, 5), 0)
_, thresh = cv2.threshold(blur, 127, 255, cv2.THRESH_BINARY_INV)
# 进行边缘检测
edges = cv2.Canny(thresh, 50, 150)
# 查找轮廓
contours, _ = cv2.findContours(edges, cv2.RETR_EXTERNAL, cv2.CHAIN_APPROX_SIMPLE)
# 遍历轮廓,找到齿状物的区域
comb_teeth_count = 0
missing_teeth_count = 0
# 设置最小面积,避免噪声
min_area = 60 # 根据梳子齿大小调整此值
for contour in contours:
area = cv2.contourArea(contour)
if area > min_area:
comb_teeth_count += 1
# 假设正常梳子有 n 个齿,计算缺失齿
expected_teeth_count = 36 # 根据实际梳子齿数修改
missing_teeth_count = expected_teeth_count - comb_teeth_count
print(f'梳子的齿数: {comb_teeth_count}')
print(f'缺失的齿数: {missing_teeth_count}')
# 缩放图像
scale_factor = 0.5 # 设置缩放比例,0.5表示缩小一半
resized_image = cv2.resize(edges, None, fx=scale_factor, fy=scale_factor, interpolation=cv2.INTER_LINEAR)
# 显示原始图像和处理后的缩放图像
cv2.imshow('Original Image', image)
cv2.imshow('Processed Image (Resized)', resized_image)
cv2.waitKey(0)
cv2.destroyAllWindows()
Bug
不同照片由于拍摄距离不同,其最小面积不同,因此不能广泛适用
运行结果如下 
Note
import cv2
import numpy as np
# Define image paths in order
image_paths = [f'../picture/{i}.bmp' for i in range(1, 9)]
frame_coords = {
1: ([(1828, 1590), (1952, 962), (1816, 928), (1676, 1560)],
[(1776, 1100), (1800, 992), (696, 714), (668, 807)],
[(1720, 1340), (1744, 1259), (624, 982), (604, 1059)]),
2: ([(1757, 1873), (2008, 1282), (1882, 1220), (1615, 1812)],
[(1804, 1405), (1856, 1298), (832, 787), (788, 875)],
[(1712, 1594), (1744, 1516), (700, 1020), (664, 1098)]),
3: ([(1015, 1696), (1589, 1405), (1531, 1277), (943, 1558)],
[(1392, 1346), (1472, 1307), (1004, 267), (932, 296)],
[(1152, 1448), (1240, 1409), (760, 379), (672, 413)]),
4: ([(893, 1478), (1436, 1822), (1516, 1706), (976, 1346)],
[(1460, 1670), (2116, 729), (2032, 671), (1380, 1614)],
[(1252, 1521), (1892, 573), (1820, 530), (1172, 1473)]),
5: ([(350, 743), (324, 1390), (464, 1402), (504, 749)],
[(1608, 1409), (1616, 1307), (472, 1210), (464, 1307)],
[(1632, 1200), (1644, 1100), (492, 1020), (488, 1100)]),
6: ([(1736, 1293), (1780, 671), (1648, 656), (1588, 1293)],
[(1632, 836), (1640, 724), (508, 583), (495, 690)],
[(1608, 1040), (1616, 943), (472, 830), (464, 923)]),
7: ([(1308, 1650), (1300, 1510), (724, 1510), (724, 1650)],
[(1268, 1497), (1264, 831), (1152, 831), (1152, 1497)],
[(1070, 1510), (1030, 832), (930, 832), (970, 1510)]),
8: ([(1868, 1147), (1872, 588), (1716, 583), (1708, 1162)],
[(1712, 705), (1712, 603), (1048, 603), (1048, 705)],
[(1708, 928), (1708, 828), (1040, 828), (1036, 938)])
}
def load_image(index):
img = cv2.imread(image_paths[index])
img_gray = cv2.cvtColor(img, cv2.COLOR_RGB2GRAY)
return img, img_gray
def select_frame(img, coords, color):
frame = np.array(coords, dtype=np.int32)
cv2.polylines(img, [frame], True, color, 4)
return frame
def calculate_variance(img_gray, frame):
mask = np.zeros(img_gray.shape[:2], dtype=np.uint8)
cv2.fillPoly(mask, [frame], 255)
roi = img_gray[mask > 0]
mean_value = np.mean(roi)
variance = np.mean((roi - mean_value) ** 2)
return mean_value, variance
def display_image(img):
scaled_img = cv2.resize(img, (0, 0), fx=0.3, fy=0.3)
cv2.imshow('Pre Image with Rectangle', cv2.GaussianBlur(scaled_img, (5, 5), 0))
cv2.waitKey(0)
cv2.destroyAllWindows()
def blob_selection(img_gray, frame):
blurred = cv2.GaussianBlur(img_gray, (5, 5), 0)
_, binary = cv2.threshold(blurred, 200, 240, cv2.THRESH_BINARY_INV)
mask = np.zeros_like(binary)
cv2.fillPoly(mask, [frame], 255)
roi = cv2.bitwise_and(binary, binary, mask=mask)
contours, _ = cv2.findContours(roi, cv2.RETR_EXTERNAL, cv2.CHAIN_APPROX_SIMPLE)
filtered_contours = [cnt for cnt in contours if cv2.arcLength(cnt, True) >= 40]
return len(filtered_contours)
if __name__ == "__main__":
for index in range(len(image_paths)):
img, img_gray = load_image(index)
frames = frame_coords[index + 1]
colors = [(0, 0, 255), (0, 255, 0), (255, 255, 0)]
frame1_data = []
frame2_data = []
for i, coords in enumerate(frames):
frame = select_frame(img, coords, colors[i])
if i == 1:
mean_value, variance = calculate_variance(img_gray, frame)
frame1_data = [blob_selection(img_gray, frame), mean_value, variance]
elif i == 2:
mean_value, variance = calculate_variance(img_gray, frame)
frame2_data = [blob_selection(img_gray, frame), mean_value, variance]
missing_teeth = frame2_data[0] - frame1_data[0]
dense_end = "绿色框: 密集端" if frame2_data[1] > frame1_data[1] else "蓝色框: 密集端"
print(f"图片 {index + 1}:")
print(f"缺齿数: {missing_teeth}")
print(f"{dense_end}")
display_image(img)
手动画框来检测,有点呆,等待进一步改进
Modbus¶
Modbus 主从机通信 ¶
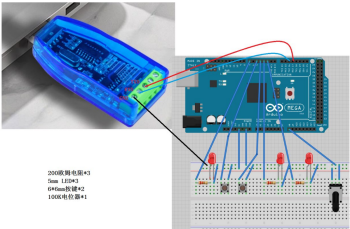
从机要求
- 2 路离散量输入(按键代替)
- 2 路开关量控制,用 LED 模拟
- 一路模拟量输入,用电位器模拟(输入寄存器)
- 一路模拟量输出,用 LED 进行 PWM 调光(保持寄存器)
接线如下图
- 编辑器:Arduino
- 调用库:ModbusRTUSlave
具体代码如下
#include <ModbusRTUSlave.h>
const byte keyPins[2] = {4, 5};
const byte ledPins[3] = {2, 3, 7};
const byte potPin = A8;
const byte dePin = 13;
bool coils[2];
bool discreteInputs[2];
uint16_t holdingRegisters[1] = {0};
uint16_t inputRegisters[1] = {0};
ModbusRTUSlave modbus(Serial2, dePin);
void setup()
{
Serial.begin(115200);
Serial2.begin(115200);
pinMode(keyPins[0], INPUT_PULLUP);
pinMode(keyPins[1], INPUT_PULLUP);
pinMode(ledPins[0], OUTPUT);
pinMode(ledPins[1], OUTPUT);
pinMode(ledPins[2], OUTPUT);
pinMode(potPin, INPUT);
modbus.configureCoils(coils, 2);
modbus.configureDiscreteInputs(discreteInputs, 2);
modbus.configureHoldingRegisters(holdingRegisters, 1);
modbus.configureInputRegisters(inputRegisters, 1);
modbus.begin(1, 115200);
}
void loop()
{
modbus.poll();
discreteInputs[0] = digitalRead(keyPins[0]); //按键未按下,discreteInputs = 0;按键按下,discreteInputs = 1
discreteInputs[1] = digitalRead(keyPins[1]);
// Serial.print("Key 1: ");
// Serial.println(digitalRead(keyPins[0]));
// Serial.print("Key 2: ");
// Serial.println(digitalRead(keyPins[1]));
inputRegisters[0] = analogRead(potPin);
//控制 LED(线圈状态)
digitalWrite(ledPins[0], coils[0] ? HIGH : LOW);//根据线圈状态控制 LED
// digitalWrite(ledPins[0], 1);//根据线圈状态控制 LED
// Serial.print("coils[0]: ");
// Serial.print(coils[0]);
// Serial.print(" ");
// Serial.print("coils[1]: ");
// Serial.print(coils[1]);
// Serial.print("\n");
digitalWrite(ledPins[1], coils[1] ? HIGH : LOW);//根据线圈状态控制 LED
//控制模拟量输出(LED PWM 调光)
analogWrite(ledPins[2],holdingRegisters[0]);//根据保持寄存器的值调节 LED 亮度
}