机器人建模 课程资源 98 往年答案
主要内容:基于 Coppeliasim
绪论 常见机械臂几何结构
空间描述与变换 坐标系与向量 笛卡尔直角坐标系
交于原点的三条不共面的数轴(常称 x y 轴和 z 三条数轴(主轴)上度量单位相等的仿射坐标系称为空间笛卡尔坐标系 下面所有坐标系均采用直角右手坐标系 向量的表示
向量 \(r_{O_AD}\) \(\hat{X}_A, \hat{Y}_A, \hat{Z}_A\) 3 \(d_x \hat{X}_A, d_y \hat{Y}_A, d_z \hat{Z}_A\)
\(r_{O,D} = d_x \hat{X}_A + d_y \hat{Y}_A + d_z \hat{Z}_A = \left( \hat{X}_A \quad \hat{Y}_A \quad \hat{Z}_A \right) \begin{pmatrix} d_x \\ d_y \\ d_z \end{pmatrix}\)
简洁表达 \(^A D = \begin{pmatrix} d_x \\ d_y \\ d_z \end{pmatrix}\)
向量点乘 向量叉乘
内积结果是标量\(r_{OP}\) 和 \(r_{OQ}\) 的点乘(内积)可按下式计算:
\[ r_{OP} \cdot r_{OQ} = ^AP \cdot ^AQ = ^AP^T \cdot ^AQ\\ = (p_x \quad p_y \quad p_z)\begin{pmatrix}q_x\\q_y\\q_z\end{pmatrix} \\ = p_xq_x + p_yq_y + p_zq_z \]
两个向量 \(\vec{a}\) \(\vec{b}\) \(\vec{c}\) :
\[ \vec{c} = \vec{a} \times \vec{b}= |a||b|\sin\theta \]
方向遵循右手定则,垂直于这两个向量所在的平面。
简单计算方法 :
把 \(\vec{a}\) \(\vec{b}\) \[ \begin{pmatrix} a_x & a_y & a_z & a_x & a_y & a_z \\ b_x & b_y & b_z & b_x & b_y & b_z \end{pmatrix} \]
去掉第一列和最后一列,剩下的 3 2x2 1 ) ,计算行列式即可
点和刚体的描述 点
\[ r_{O_AP} = \begin{pmatrix} \hat{X}_A & \hat{Y}_A & \hat{Z}_A \end{pmatrix}^A P \]
刚体
在 \(\{A\}\) \(\{B\}\)
\[ \begin{pmatrix} \hat{X}_B & \hat{Y}_B & \hat{Z}_B \end{pmatrix} = \begin{pmatrix} \hat{X}_A & \hat{Y}_A & \hat{Z}_A \end{pmatrix}_B^A R \]
表示方法 核心思想 公式 缺点 旋转矩阵 使用 3x3 \(\mathbf{R} = \begin{pmatrix} r_{11} & r_{12} & r_{13} \\ r_{21} & r_{22} & r_{23} \\ r_{31} & r_{32} & r_{33} \end{pmatrix}\) 1. 参数多(9 个) ,冗余2. 难以直观理解旋转过程3. 插值复杂 欧拉角 将旋转分解为绕三个正交轴的旋转 \((\alpha, \beta, \gamma)\) ,常用 ZYX \(\mathbf{R} = R_z(\alpha) R_y(\beta) R_x(\gamma)\) 易于理解和可视化1. 万向锁问题(奇异性)2. 不同顺序定义不唯一3. 插值不平滑 等效轴角 用一个单位轴和一个旋转角表示旋转 \((\mathbf{k}, \theta)\) ,其中 \(\mathbf{k} = (k_x, k_y, k_z)\) \(\theta\) \(\mathbf{R} = \mathbf{I} + \sin\theta \mathbf{K} + (1 - \cos\theta) \mathbf{K}^2\) , \(\mathbf{K} = \begin{pmatrix} 0 & -k_z & k_y \\ k_z & 0 & -k_x \\ -k_y & k_x & 0 \end{pmatrix}\) 1. 无法直接表示 0° 2. 插值时需注意旋转角的周期性 四元数 使用四维超复数表示旋转 \(q = \eta + i\varepsilon_1 + j\varepsilon_2 + k\varepsilon_3\) ,其中 \(\eta^2 + \varepsilon_1^2 + \varepsilon_2^2 + \varepsilon_3^2 = 1\) 参数最少(4 个)避免了奇异性问题1. 较难直观理解2. 计算稍复杂(但比旋转矩阵简单)
坐标系变换 对于齐次变换矩阵,右乘是先平移后旋转,左乘是先旋转后平移。相对于基础坐标系的旋转,可能会产生平移
机器人运动学 使两个刚体直接接触而又能产生一定相对运动的联接称为运动副 ,机器人的运动副也称关节,连杆即指由关节所联的刚体 本课程中的关节仅限转动副和移动副 串联机构:多个连杆通过关节以串联形式连接成首尾不封闭的机械结构 为了确定末端执行器在 3 6
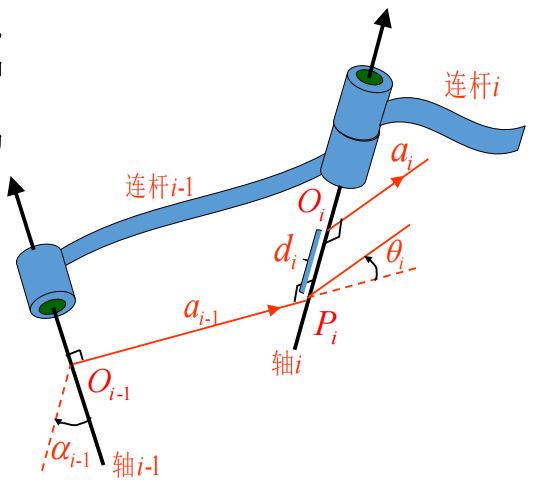
改进 D-H 确定坐标系的方法
第 1 :确定 \(Z_i\) \(Z_i\) \(i\) 第 2 :确定原点 \(O_i\) \(O_i\) \(Z_i\) \(Z_{i+1}\) 第 3 :确定 \(X_i\) \(X\) \(Z_i\) \(Z_{i+1}\) \(Z_i\) \(Z_{i+1}\) 第 4 :确定 \(Y_i\) \(Y_i = Z_i \times X_i\) ,使坐标系为右手坐标系。 DH 参数的定义
杆件长度 \(a_i\) ,定义为从 \(Z_{i-1}\) \(Z_i\) \(X_{i-1}\) 杆件扭角 \(\alpha_i\) ,定义为从 \(Z_{i-1}\) \(Z_i\) \(X_{i-1}\) 关节距离 \(d_i\) ,定义为从 \(X_{i-1}\) \(X_i\) \(Z_i\) 关节转角 \(\theta_i\) \(X_{i-1}\) \(X_i\) \(Z_i\)
正运动学 相邻连杆的坐标系变换
{i -1} 经四步变换成为 {i }:
沿联体 x \(a_{i-1}\) 沿联体 x \(\alpha_{i-1}\) 沿联体 z \(d_i\) 沿联体 z \(\theta_i\) \[ T = \begin{pmatrix} 1 & 0 & 0 & a_{i-1} \\ 0 & \cos\alpha_{i-1} & -\sin\alpha_{i-1} & 0 \\ 0 & \sin\alpha_{i-1} & \cos\alpha_{i-1} & 0 \\ 0 & 0 & 0 & 1 \end{pmatrix} \begin{pmatrix} \cos\theta_i & -\sin\theta_i & 0 & 0 \\ \sin\theta_i & \cos\theta_i & 0 & 0 \\ 0 & 0 & 1 & d_i \\ 0 & 0 & 0 & 1 \end{pmatrix} \]
经过矩阵乘法后,得到的结果为:
\[ = \begin{pmatrix} \cos\theta_i & -\sin\theta_i & 0 & a_{i-1} \\ \sin\theta_i\cos\alpha_{i-1} & \cos\theta_i\cos\alpha_{i-1} & -\sin\alpha_{i-1} & -\sin\alpha_{i-1}d_i \\ \sin\theta_i\sin\alpha_{i-1} & \cos\theta_i\sin\alpha_{i-1} & \cos\alpha_{i-1} & \cos\alpha_{i-1}d_i \\ 0 & 0 & 0 & 1 \end{pmatrix} \]
逆运动学 一些结论
所有包含转动关节和移动关节的串联型 6 \(\alpha_i\) 为0或90°
解析解 代数解法 首先根据正运动学推导出齐次变换矩阵,然后在根据齐次变换矩阵中各元素之间的关系求解出关节空间参数 ( )
几何解法 也是一样,观察
数值解 牛顿 -
给定 N \(T^d\) \(\Phi = [\phi_1 \quad \phi_2 \quad \cdots \quad \phi_N]^T\)
\[ {}^0 T = {}^0 T_1(\phi_1) \cdot {}^1 T_2(\phi_2) \cdots \cdots {}^N-1 T(\phi_N) = T^d \]
记末端执行器的位姿为 \(X(\Phi)\) \(X^d\) \(\Phi\) \(X(\Phi) = X^d\) -
记期望的关节变量为 \(\Phi^d\) \(X(\Phi^d) = X^d\) - \(\Phi^0\) \(\Phi^k\) \(\Phi^d\)
记 \(\delta \Phi^k = \Phi^d - \Phi^k\) \(\delta X(\Phi^k) = X(\Phi^d) - X(\Phi^k)\) ,则由一阶泰勒展开近似得到:
\[ X(\Phi^d) = X(\Phi^k) + \frac{\partial X}{\partial \Phi}(\Phi^k) \delta \Phi^k + O((\delta \Phi^k)^2) \]
\[ \delta X(\Phi^k) = \frac{\partial X}{\partial \Phi}(\Phi^k) \delta \Phi^k = J_a(\Phi^k) \delta \Phi^k \]
由此得到迭代计算式:
\[ \Phi^{k+1} = \Phi^k + J_a^{-1}(\Phi^k) \delta X(\Phi^k) \]
微分运动学与静力学 微分运动学 定义 符号表示 符号 含义 注意 \(^AV_Q\) A 坐标系下 Q \(^B(^AV_Q)\) 在 \(B'\) Q \(^B(^AV_Q) \ne ^BV_Q\) \(\upsilon _c\) 世界坐标系下 C \(\upsilon _c = ^UV_{CORG}\) \(^A\Omega_Q\) A 坐标系下 Q \(^B(^A\Omega_Q)\) 在 \(B'\) Q \(^B(^A\Omega_Q) \ne ^B\Omega_Q\) \(\omega _c\) 世界坐标系下 C \(\omega _c = ^U\Omega_{CORG}\)
Attention
\(^A\upsilon _c = {}^A_U\mathbf{R} \upsilon _c = {}^A_U\mathbf{R} ^UV_{CORG} \ne ^AV_{CORG}\) \(^A\omega _c = {}^A_U\mathbf{R} \omega _c = {}^A_U\mathbf{R} ^U\Omega _{CORG} \ne ^A \Omega _{CORG}\) \(B'\) 坐标系其实是与A坐标系原点相同,姿态与B坐标系相同的一个新的坐标系
矩阵定义 \[ S = \dot{R}R^\top = \dot{R}R^{-1} \]
其中 S
\[ S + S^\top = 0_n \]
三维向量与三维反对称矩阵的关系
针对三维向量 \(P = \begin{pmatrix} p_x \\ p_y \\ p_z \end{pmatrix}\) \(P\) \(P^\wedge\)
\[ P^\wedge = \begin{pmatrix} p_x \\ p_y \\ p_z \end{pmatrix}^\wedge = \begin{pmatrix} 0 & -p_z & p_y \\ p_z & 0 & -p_x \\ -p_y & p_x & 0 \end{pmatrix} \]
三维反对称矩阵与三维向量是一一对应的,记 \(P^\wedge\) \(\left( P^\wedge \right)^\vee = P\)
\[ P = \begin{pmatrix} 0 & -p_z & p_y \\ p_z & 0 & -p_x \\ -p_y & p_x & 0 \end{pmatrix}^\vee = \begin{pmatrix} p_x \\ p_y \\ p_z \end{pmatrix} \]
线速度向量 若 \( {}^B\mathbf{Q} \) {B} \( {}^B\mathbf{V}_Q \)
\[ {}^B\mathbf{V}_Q = \frac{d}{dt} {}^B\mathbf{Q} = \lim_{\Delta t \to 0} \frac{{}^B\mathbf{Q}(t + \Delta t) - {}^B\mathbf{Q}(t)}{\Delta t} \]
速度矢量 \( ^A({}^B\mathbf{V}_Q ) \)
\[ {}^A({}^B\mathbf{V}_Q) = {}^A_B\mathbf{R} {}^B\mathbf{V}_Q = \frac{d}{dt} {}^A_B\mathbf{Q} = \lim_{\Delta t \to 0} {}^A_B\mathbf{R}(t) \left( \frac{{}^B\mathbf{Q}(t + \Delta t) - {}^B\mathbf{Q}(t)}{\Delta t} \right) \]
当两个上标相同时,无需给出外层上标,即:
\[ ^B(^BV_Q) = ^BV_Q \]
需要注意,\( {}^A({}^B\mathbf{V}_Q) \) \( {}^A\mathbf{V}_Q \)
\[ \begin{align*} {}^A\mathbf{V}_Q &= \lim_{\Delta t \to 0} \frac{{}^A\mathbf{Q}(t + \Delta t) - {}^A\mathbf{Q}(t)}{\Delta t}\\ &= \lim_{\Delta t \to 0} \frac{{}^A\mathbf{P}_{BORG}(t + \Delta t) + {}^A_B\mathbf{R}(t + \Delta t) {}^B\mathbf{Q}(t + \Delta t) - {}^A\mathbf{P}_{BORG}(t) - {}^A_B\mathbf{R}(t) {}^B\mathbf{Q}(t)}{\Delta t}\\ &= ^AV_{BORG} + {}^A_B\mathbf{\dot{R}}{}^B\mathbf{Q}+^A_B\mathbf{R} {}^B\mathbf{V}_Q \end{align*} \]
角速度向量 刚体的定点转动:刚体绕体内或其外延部分的一固定点旋转
定点转动不同于定轴转动
区别点 定点转动 定轴转动 转轴性质 转轴通过一个固定点,但转轴的方向在空间中会随时间改变 转轴在空间中的位置和方向始终保持不变 角速度特性 角速度的大小和方向都是时间的函数,角速度矢量在空间中不断变化 角速度的方向始终沿着固定轴,只有大小可以随时间变化 运动复杂程度 运动复杂,需要考虑多个方向的转动,通常用欧拉角描述 运动简单,仅在一个固定平面内进行 自由度 3 个自由度1 个自由度 运动描述 可以看作绕瞬时轴的定轴转动,但瞬时轴会不断变化 始终绕一个固定的轴转动 典型实例 陀螺、回转罗盘 门的转动、风车的旋转
由理论力学知:刚体(其联体坐标系为 \(\{B\}\) \(\{A\}\)
点 \({}^A O_B\) 刚体绕 \({}^A O_B\) 由理论力学知:
在任一瞬间,\(\{B\}\) \(\{A\}\) \(\{A\}\) 瞬轴的位置可随时间变化,但原点始终在瞬轴上。 在 \(\{A\}\) \(\{B\}\) \({}^A\Omega_B\)
\({}^A\Omega_B\) \(\{A\}\) \({}^A\Omega_B\) \(\{A\}\) \(\{B\}\) 线速度变化 纯平移的线速度变化
\[ ^A\mathbf{V}_Q = {^A\mathbf{V}_{BORG}} + {^A_B}\mathbf{R}{^B\mathbf{V}_Q} \]
一般运动的线速度变化
公式推导
\({}^A_B \dot{R} = {}^A_B S \, {}^A_B R = {}^A \mathbf{\Omega}_B \times {}^A_B R\) \({}^A_B S = {}^A_B \dot{R} \, {}^A_B R^{-1} = {}^A_B \dot{R} \, {}^A_B R^\top\)
\[ ^A\mathbf{V}_Q = {^A\mathbf{V}_{BORG}} + {}^A_B\mathbf{\dot{R}}{}^B\mathbf{Q} +^A_B\mathbf{R} {}^B\mathbf{V}_Q\\ = {^A\mathbf{V}_{BORG}} + {^A_B}\mathbf{R}{^B\mathbf{V}_Q} + {^A\mathbf{\Omega}_B} \times {^A_B}\mathbf{R}{^B\mathbf{Q}} \]
\(Q\) \({A}\) \({B}\) \(Q\) \({B}\) \({B}\) \({A}\) \(Q\)
角速度变化 在参考坐标系 \(\{A\}\) \(\{C\}\) \({}^A\Omega_C\)
\[ {}^A\Omega_C = {}^A\Omega_B + {}^A_B R \, {}^B\Omega_C \]
在同一坐标系中,角速度可以相加
速度传递 规律
前一个关节的线速度和角速度都要转换到后一个关节上面 转动型关节会增加角速度的项,平动型关节会增加线速度的项。 转动型关节
角速度:连杆 i+1 {i+1}
\[ ^{i+1}\!\omega_{i+1} = ^{i+1}_i\!R {^i\omega_i} + \dot{\theta}_{i+1} {}^{i+1}\!\hat{Z}_{i+1}\\ \]
其中,\(\hat{Z}_{i+1}\) \(i+1\) \({i+1}\) \({\theta}_{i+1}\) \(i+1\)
线速度:连杆 i+1 {i+1}
\[ {}^{i+1}\!v_{i+1} = {^{i+1}_iR} (^iv_i + ^i\omega_i \times {^iP_{i+1}}) \]
连杆的长度隐含在了 \(^iP_{i+1}\)
平动型
角速度:没有关节转动对下一个关节角速度的影响
\[ ^{i+1}\omega_{i+1} = _i^{i+1}R {^i\omega_i} \]
线速度:要加一个在轴线上的速度
\[ ^{i+1}v_{i+1} = _i^{i+1}R (^iv_i + ^i\omega_i \times ^iP_{i+1}) + \dot{d_{i+1}} \hat{Z}_{i+1} \]
向外迭代法
知道了这样的变换方法,就可以从连杆 0 N
雅可比矩阵 雅可比矩阵用于描述函数的输入变量和输出变量之间的线性关系。对于函数 \(F(X)\) \(J(X)\)
\[ \delta Y = \frac{\partial F}{\partial X} \delta X = J(X) \delta X \]
在动态系统中,输出变量 \(Y\) \(\dot{Y}\)
\[ \dot{Y} = J(X) \dot{X} \]
注意
雅可比矩阵可看成是 X Y \(J(X)\) 是一个时变的线性变换。
几何雅可比矩阵 几何雅可比矩阵描述了操作臂的关节速度 \(\dot{\theta}\) \(v = \begin{pmatrix} v \\ \omega \end{pmatrix}\) \(J(\theta)\)
\[ v = \begin{pmatrix} v \\ \omega \end{pmatrix} = J(\theta) \dot{\theta} \]
前述向外迭代法计算机械臂末端速度的算法本质上是计算操作臂几何雅 可比矩阵的方法之一。
机械臂末端相对于基坐标系的角速度向量 \(\omega = (\omega_x, \omega_y, \omega_z)^T\)
当我们使用欧拉角来表示机械臂末端的姿态时,欧拉角是一组描述物体在空间中方向的三个角度。然而,直接对欧拉角进行求导并不能得到正确的角速度向量,因为欧拉角之间存在耦合效应,即一个角度的变化会影响到其他角度的变化。这种耦合效应会导致直接求导得到的角速度向量不准确。
采用向量积法直接求出末端线速度和角速度,可以构造几何雅可比矩阵
假设其他关节固定不动,只有第 \(i\) \(N\)
若第 \(i\) \(v_N^{(i)} = \dot{d}_i \hat{Z}_i\) - 角速度 \(\omega_N^{(i)} = 0\)
若第 \(i\) \(v_N^{(i)} = \dot{\theta}_i \hat{Z}_i \times (O_N - O_i)\) - 角速度 \(\omega_N^{(i)} = \dot{\theta}_i \hat{Z}_i\)
下图是以 \(Z_2\)
注意角速度对末端水平速度的影响是角速度的矢量与关节位置与末端位置的矢量叉乘
末端实际线速度和角速度就是各关节造成的线速度和角速度的总和:
\[ v_N = \sum_{i=1}^{N} v_N^{(i)}, \quad \omega_N = \sum_{i=1}^{N} \omega_N^{(i)} \]
以机械臂每个关节均为旋转关节 为例构造雅可比矩阵,定义笛卡尔速度向量 \(v_N = \begin{pmatrix} v_N \\ \omega_N \end{pmatrix} \in \mathbb{R}^6\) \(\dot{\theta} = \begin{pmatrix} \dot{\theta}_1 \\ \dot{\theta}_2 \\ \vdots \\ \dot{\theta}_N \end{pmatrix} \in \mathbb{R}^N\)
\[ v_N = \begin{pmatrix} \dot{Z}_1 \times (O_N - O_1) & \dot{Z}_2 \times (O_N - O_2) & \cdots & \dot{Z}_{N-1} \times (O_N - O_{N-1}) & 0 \\ \dot{Z}_1 & \dot{Z}_2 & \cdots & \dot{Z}_{N-1} & \dot{Z}_N \end{pmatrix} \begin{pmatrix} \dot{\theta}_1 \\ \dot{\theta}_2 \\ \vdots \\ \dot{\theta}_N \end{pmatrix}\\ = J(\theta) \dot{\theta} \]
其中,\(J(\theta) \in \mathbb{R}^{6 \times N}\)
向量积构造法是计算几何雅可比矩阵的方法之一。对于任意已知的操作臂位形,关节速度和操作臂末端速度的关系是线性的,然而这种线性关系仅仅是瞬时的,因为在下一刻,雅可比矩阵就会有微小的变化。雅可比矩阵是时变的。
参考坐标系变换下的雅可比矩阵
若关心 \(\{i\}\)
\[ \begin{pmatrix} \dot{v}_N \\ \dot{\omega}_N \end{pmatrix} = \begin{pmatrix} {}^i_0 R & 0 \\ 0 & {}^i_0 R \end{pmatrix} \begin{pmatrix} v_N \\ \omega_N \end{pmatrix} = \begin{pmatrix} {}^i_0 R & 0 \\ 0 & {}^i_0 R \end{pmatrix} J(\theta) \dot{\theta} \]
可记变换后的雅可比为:
\[ {}^i J(\theta) = \begin{pmatrix} {}^i_0 R & 0 \\ 0 & {}^i_0 R \end{pmatrix} J(\theta) \]
即:
\[ \begin{pmatrix} \dot{v}_N \\ \dot{\omega}_N \end{pmatrix} = {}^i J(\theta) \dot{\theta} \]
一般来说,雅可比矩阵都会计算到末端,即最后的 \(\theta\) 0
\(\dot{\theta_3}=0\) ,\({}^3v_3\) 和\({}^3 \omega_3\) 均按照之前的推导计算,如下图。
逆微分运动学 一些定义 若已知末端执行器笛卡尔空间速度 \(v_N\) ) ,产生 \(v_N\)
\[ \dot{\theta} = J^{-1}(\theta) v_N \]
由于对于冗余机械臂和欠驱动机械臂,雅可比矩阵不是方阵,需要考虑雅可比矩阵的伪逆(广义逆) 。
若矩阵 \(A\) \(m \times n (m \neq n)\) \(A\) \(A\) \(A^+\)
当 \(m > n\) \(A^+\) \(A^+ = A_{\text{left}}^{-1} = (A^T A)^{-1} A^T\) ,且 \(A^T A\) 当 \(m < n\) \(A^+\) \(A^+ = A_{\text{right}}^{-1} = A^T (A A^T)^{-1}\) ,且 \(A A^T\) 冗余机械臂和欠驱动机械臂
特性 冗余机械臂 欠驱动机械臂 定义 自由度(DOF)大于完成任务所需自由度的机械臂 控制输入少于自由度的机械臂,即驱动器数量少于关节数量 自由度与驱动器关系 自由度多于任务需求,驱动器数量等于自由度 自由度多于驱动器数量 应用场景 复杂任务,如避障、优化路径、提高灵活性 简化结构、降低成本,适用于抓取不规则物体等 优点 提高灵活性、避障能力、优化关节力矩 简化结构、降低成本、减少能耗 缺点 结构复杂、控制算法复杂、成本较高 控制难度大、运动精度受限、灵活性较差 典型应用 工业机器人、空间机器人、医疗机器人 机器人手爪、水下机器人、服务机器人 控制难度 高(需要解决冗余自由度的优化问题) 高(需要解决欠驱动系统的运动规划和控制问题)
逆微分运动 若 \(A\) \(m \times n\) \(A\) \(Ax = b\)
当 \(m > n\) 方程组是过定的,通常方程组无解。此时,使得 \(\|Ax - b\|^2\) \(x\)
\[ x^* = A^+ b = A_{\text{left}}^{-1} b = (A^T A)^{-1} A^T b \]
例如:
\[ \begin{bmatrix} 1 \\ 1 \end{bmatrix} x = \begin{bmatrix} 0 \\ 2 \end{bmatrix}, \quad x^* = \left( \begin{bmatrix} 1 & 1 \\ 1 & 1 \end{bmatrix} \right)^{-1} \begin{bmatrix} 1 & 1 \\ 1 & 2 \end{bmatrix} \begin{bmatrix} 0 \\ 2 \end{bmatrix} = (2)^{-1} \begin{bmatrix} 2 \end{bmatrix} = \begin{bmatrix} 1 \end{bmatrix} \]
当 \(m < n\) 方程组是欠定的,通常方程组可能存在无数个解。此时,所有解中使得 \(\|x\|\) \(x\)
\[ x^* = A^+ b = A_{\text{right}}^{-1} b = A^T (A A^T)^{-1} b \]
例如:
\[ \begin{bmatrix} 1 & 1 \end{bmatrix} \begin{bmatrix} x_1 \\ x_2 \end{bmatrix} = 2, \quad \begin{bmatrix} x_1^* \\ x_2^* \end{bmatrix} = \begin{bmatrix} 1 \\ 1 \end{bmatrix} \left( \begin{bmatrix} 1 & 1 \end{bmatrix} \begin{bmatrix} 1 \\ 1 \end{bmatrix} \right)^{-1} 2 = \begin{bmatrix} 1 \\ 1 \end{bmatrix} (2)^{-1} (2) = \begin{bmatrix} 1 \\ 1 \end{bmatrix} \]
零空间(Null Space)
若 \(A\) \(m \times n\) \(A\) \(Ax = 0\) \(N(A) = \{x \in \mathbb{R}^n : Ax = 0\}\)
当 \(m \geq n\) \(A\) \(A\) \[ A = \begin{bmatrix} 1 \\ 1 \end{bmatrix}, \quad x = 0 \]
当 \(m < n\) \(A\) \(A\) \[ \tilde{x} = (I - A^+ A)x = (I - A_{\text{right}}^{-1} A)x = (I - A^T (A A^T)^{-1} A)x \]
其中,\(x\) \(n\)
例如:
\[ A = \begin{bmatrix} 1 & 1 \end{bmatrix}, \quad \tilde{x} = \left( \begin{bmatrix}1 & 0 \\ 0 & 1 \end{bmatrix} - \begin{bmatrix}1/2 \\ 1/2 \end{bmatrix} \begin{bmatrix}1 & 1 \end{bmatrix} \right) \begin{bmatrix} x_1 \\ x_2 \end{bmatrix} = \begin{bmatrix} 1/2 & -1/2 \\ -1/2 & 1/2 \end{bmatrix} \begin{bmatrix} x_1 \\ x_2 \end{bmatrix} \]
逆运动学解的情况 在机械臂关节角处于 \(\theta\) \(J(\theta)\) \(v_N\)
无冗余 机械臂操作空间维度等于机械臂关节数,若雅可比矩阵满秩,则
\[ \dot{\theta} = J^{-1}(\theta) v_N \]
冗余 机械臂操作空间维度小于机械臂关节数,对于末端执行器的某一笛卡尔空间速度,通常会有无穷组对应的关节速度,若雅可比矩阵是行满秩的,其中满足关节速度范数最小的一个特解(最小范数解) ,用右伪逆计算
\[ \dot{\theta}_r = J^T (J J)^{-1} v_N \]
通解为
\[ \dot{\theta} = \dot{\theta}_r + \dot{\tilde{\phi}}_f = J^T (J^T)^{-1} v_N + (I - J^T (J^T)^{-1} J) \dot{\phi}_f \]
其中 \(\phi_f\)
欠驱动 机械臂操作空间维度大于机械臂关节数,对于末端执行器的某一笛卡尔空间速度,可能没有对应的关节速度,这时,若雅可比矩阵是列满秩的,只能得到误差范数最小的关节速度(最小二乘解) ,用左伪逆计算
\[ \dot{\theta} = (J^T J)^{-1} J^T v_N \]
奇异性 大多数 \(6 \times 6\) \(J\) \(\theta\) \(\theta\)
所有的操作臂在工作空间的边界都存在奇异位形,并且大多数操作臂在它们的工作空间也有奇异位形。
对于空间机械臂,总有 \(\text{rank}(J) \leq \min(6, n)\) \(\text{rank}(J) \leq \min(2, n)\) 其中n表示机械臂关节数
空间机械臂 平面机械臂
其末端执行器在三维空间中具有 6 3 个平移自由度和 3 ) ,因此雅可比矩阵 \(J\) 6
雅可比矩阵的秩 \(\text{rank}(J)\) \(n\) \(\text{rank}(J) \leq \min(6, n)\)
末端执行器在二维平面中具有 3 2 个平移自由度和 1 ) ,因此雅可比矩阵 \(J\) 3
但是,由于平面机械臂的旋转轴一直垂直于平面,转角大小为所有转动关节的转角之和,所以实际上平面机械臂的末端执行器在平面内只有 2 2 个平移自由度) 。
因此,平面机械臂的雅可比矩阵 \(J\) \(\text{rank}(J)\) \(n\) \(\text{rank}(J) \leq \min(2, n)\)
奇异点的判断条件
对于一般机械臂,奇异位形为令雅可比矩阵 \(J\) \(\theta\) \(\text{rank}(J(\theta)) < \min(m, n)\)
无冗余(\(m=n\) ) :在此 \(\theta\) \(J\) \(\text{det}(J(\theta))=0\) 冗余(\(m<n\) ) :在此 \(\theta\) \(J\) \(\text{rank}(J(\theta))<m\) 欠驱动(\(m>n\) ) :在此 \(\theta\) \(J\) \(\text{rank}(J(\theta))<n\) Attention
对于平面机械臂,由于其末端姿态只有一个旋转自由度,且旋转轴一直垂直于平面,转角大小为所有转动关节的转角之和,所以判断奇异性时,平面机械臂只需关心平面二维线速度部分的雅可比矩阵,即
\[ \begin{pmatrix} \dot{v}_x \\ \dot{v}_y \end{pmatrix} = J_0 \dot{q} \]
因此,对于平面机械臂,上述奇异位形的判断条件需利用雅可比矩阵 \(J_0\)
奇异位形大致分为两类:
边界奇异性 工作空间边界的奇异位形。出现在操作臂完全展开或者收回使得末端执行器处于或非常接近空间边界的情况。
内点奇异性 工作空间内部的奇异位形。出现在远离工作空间的边界,通常是由于两个或两个以上的关节轴线共线引起的。
当操作臂处于奇异位形时,操作臂的末端在笛卡尔空间中会失去一个或多个自由度,即此时无论选择多大的关节速度,操作臂的末端在笛卡尔空间的某个方向上(或某个子空间中)都不能运动。
可操作度 可操作度是衡量机器人位形与奇异位形距离的一种度量方式
由于欠驱动机器人的逆微分运动只有最小二乘解,一般只讨论无冗余和冗余机器人的可操作性问题
若机械臂处于某位形时关节向量为 \(\phi\) \(\dot{\phi}_e\) \(\dot{\phi}_e^T \dot{\phi}_e = 1\) \(v_e\)
(1)机器人无冗余:
\[ v_e^T \left( J(\phi) J(\phi)^T \right)^{-1} v_e = 1 \]
(2)机器人冗余:
\[ v_e^T \left( J(\phi) J(\phi)^T \right)^{-1} v_e \leq 1 \]
当机器人处于某位形时,限制关节速度为单位速度向量,机器人末端速度所构成的空间称作该位形的可操作椭球体 。
假设机器人有 N m \(N \geq m\) \(m \times N\) \(J\)
\[ J = U \Sigma V^T \]
其中 \(\Sigma\) \(m \times N\) \(\Sigma = \text{diag}(\sigma_1, \sigma_2, \cdots, \sigma_m)\)
带入上面的方程得到
\[ v_e^T \left(JJ^\top\right)^{-1} v_e = \left(U^\top v_e\right)^\top \Sigma^{-2} \left(U^\top v_e\right) \]
其中,\(\Sigma^{-2} = \text{diag}\left(\sigma_1^{-2}, \sigma_2^{-2}, \cdots, \sigma_m^{-2}\right)\) ,记 \(a = U^\top v_e\)
\[ v_e^T \left(JJ^\top\right)^{-1} v_e = a^\top \Sigma^{-2} a = \sum_{i=1}^m \frac{\alpha_i^2}{\sigma_i^2} \leq 1 \]
上述是一个标准的椭球体方程,表明机器人此位形的可操作椭球体的轴向量 \(\sigma_i u_i\)
可操作椭球体的体积与雅可比矩阵 \(J\) \(\sigma_1 \sigma_2 \cdots \sigma_m\) \(\Phi\) 时的可操作度 为 \(\kappa(\Phi)\)
\[ \kappa(\Phi) = \sigma_1 \sigma_2 \cdots \sigma_m = \sqrt{\det(J(\Phi) J^\top(\Phi))} \]
(1)在奇异位形,\(JJ^\top\) \(\kappa = 0\)
(2)在非奇异位形,可操作度 \(\kappa > 0\) \(\kappa\)
分析雅可比矩阵 分析雅可比矩阵:通过操作臂末端的最小表示的运动学方程对关节变量的微分计算得到的雅可比矩阵。
令 \(X = \begin{pmatrix} P(\theta) \\ \psi(\theta) \end{pmatrix}\) \(P(\theta)\) \(\psi(\theta)\) ) 。
分析雅可比满足以下形式:
\[ \dot{X} = \begin{pmatrix} \dot{P} \\ \dot{\psi} \end{pmatrix} = J_a(\theta) \dot{\theta} \]
刚体角速度与欧拉角速率的关系 由 \(\dot{R} R R^T = S\)
\[ \begin{pmatrix} \dot{r}_{11} & \dot{r}_{12} & \dot{r}_{13} \\ \dot{r}_{21} & \dot{r}_{22} & \dot{r}_{23} \\ \dot{r}_{31} & \dot{r}_{32} & \dot{r}_{333} \end{pmatrix} \begin{pmatrix} r_{11} & r_{21} & r_{31} \\ r_{12} & r_{222} & r_{32} \\ r_{13} & r_{23} & r_{33} \end{pmatrix} = \begin{pmatrix} 0 & -\omega_z & \omega_y \\ \omega_z & 0 & -\omega_x \\ -\omega_y & \omega_x & 0 \end{pmatrix} \]
得到:
\[ \omega_x = \dot{r}_{31} r_{21} + \dot{r}_{32} r_{22} + \dot{r}_{33} r_{23} \]
\[ \omega_y = \dot{r}_{11} r_{31} + \dot{r}_{12} r_{32} + \dot{r}_{13} r_{33} \]
\[ \omega_z = \dot{r}_{21} r_{11} + \dot{r}_{22} r_{12} + \dot{r}_{23} r_{13} \]
以 Z-Y-Z \(\Psi = (\alpha \beta \gamma)^T\) \(R\)
\[ R = R_{Z Y Z}(\alpha, \beta, \gamma) = R_{Z}(\alpha) R_{Y}(\beta) R_{Z}(\gamma) \]
即:
\[ R = \begin{pmatrix} r_{11} & r_{12} & r_{13} \\ r_{21} & r_{22} & r_{23} \\ r_{31} & r_{32} & r_{33} \end{pmatrix} = \begin{pmatrix} cac\beta c\gamma - s\alpha s\gamma & -cac\beta s\gamma - sac\gamma & cas\beta \\ sac\beta c\gamma + c\alpha s\gamma & -sac\beta s\gamma + c\alpha c\gamma & sac\beta \\ -s\beta c\gamma & s\beta s\gamma & c\beta \end{pmatrix} \]
欧拉角速率为 \(\dot{\Psi} = (\dot{\alpha} \dot{\beta} \dot{\gamma})^T\)
则:
\[ \omega_x = i_{31} r_{21} + i_{32} r_{22} + i_{33} r_{23} = \left( \frac{\partial r_{31}}{\partial \alpha} r_{21} + \frac{\partial r_{32}}{\partial \alpha} r_{2} + \frac{\partial r_{33}}{\partial \alpha} r_{23} \right) \dot{\alpha} + \left( \frac{\partial r_{31}}{\partial \beta} r_{21} + \frac{\partial r_{32}}{\partial \beta} r_{2} + \frac{\partial r_{33}}{\partial \beta} r_{23} \right) \dot{\beta} + \left( \frac{\partial r_{31}}{\partial \gamma} r_{21} + \frac{\partial r_{32}}{\partial \gamma} r_{2} + \frac{\partial r_{33}}{\partial \gamma} r_{23} \right) \dot{\gamma} \]
\[ = -s\alpha \dot{\beta} + c\alpha s\beta \dot{\gamma} = \left( 0 -s\alpha \quad c\alpha s\beta \right) \dot{\Psi} \]
同样有:
\[ \omega_y = i_{1} r_{31} + i_{12} r_{32} + i_{13} r_{3} = (0 \quad c\alpha \quad s\alpha s\beta) \dot{\Psi} \]
\[ \omega_z = i_{21} r_{11} + i_{2} r_{12} + i_{23} r_{13} = (1 \quad 0 \quad c\beta) \dot{\Psi} \]
因此:
\[ \omega = \begin{pmatrix} \omega_x \\ \omega_y \\ \omega_z \end{pmatrix} = \begin{pmatrix} 0 & -s\alpha & c\alpha s\beta \\ 0 & c\alpha & s\alpha s\beta \\ 1 & 0 & c\beta \end{pmatrix} \dot{\Psi} \]
其中 \(\Psi = (\alpha ~~ \beta ~~ \gamma)^T\)
分析雅可比与几何雅可比的关系
\[ J(\theta) \dot{\theta} = \begin{pmatrix} \dot{v} \\ \dot{\omega} \end{pmatrix} = \begin{pmatrix} \dot{P} \\ B_a(\psi) \dot{\psi} \end{pmatrix} = \begin{pmatrix} I & 0 \\ 0 & B_a(\psi) \end{pmatrix} \begin{pmatrix} \dot{P} \\ \dot{\psi} \end{pmatrix} = \begin{pmatrix} I & 0 \\ 0 & B_a(\psi) \end{pmatrix} J_a(\theta) \dot{\theta} \]
\[ J_a(\theta) = \begin{pmatrix} I & 0 \\ 0 & B_a^{-1}(\psi) \end{pmatrix} J(\theta) \]
要求 \(B_a\)
记 \(T_a = \begin{pmatrix} I & 0 \\ 0 & B_a^{-1}(\psi) \end{pmatrix}\) \(J_a(\theta) = T_a J(\theta)\)
静力 本章假设
由于操作臂底座静止,因此静态平衡只考虑静止。操作臂的自由末端在工作空间推某个物体,该物体未动 本章静力学不考虑作用在连杆上的重力 所有的关节和操作臂位形不变化 操作臂在静态平衡(静止或匀速直线运动)状态下,考虑力和力矩如何从一个连杆向下一个连杆传递
定义
力 :3 维向量 $f_i = $ \(i-1\) \(i\) 力矩 :3 维向量 $n_i = $ \(i-1\) \(i\) 作用在操作臂上的静力 力 \(f\) \(O\) \(i\) \(^iP \times ^if \in \mathbb{R}^3\)
矩的大小 \(|^iP||^if| \sin \theta = h||^if|\) \(\theta\) \(^iP\) \(^if\) \(h\)
垂直于 \(^iP\) \(^if\) “矩使刚体产生绕 \(^iP \times ^if\)
力偶
两个大小相等、方向相反且不共线的平行力组成的力系 力偶的作用只改变刚体的转动状态,其转动效应可用力偶矩来度量 力偶 \((\vec{f}, -\vec{f})\) \(O\)
\[ \vec{OA} \times \vec{f} + \vec{OB} \times (-\vec{f}) = \vec{BA} \times \vec{f} \]
对刚体上的任何点,力偶矩 \(\vec{BA} \times \vec{f}\)
力偶矩向量 \(\vec{BA} \times \vec{f}\)
力的平移
在刚体上作用于 A \(\vec{f}\) B B \(\vec{f}\) \(-\vec{f}\) A \(\vec{f}\) B \(-\vec{f}\) $vec{BA} times vec{f} = $ A \(\vec{f}\) B
刚体上作用于 A \(\vec{f}\) B \(\vec{BA} \times \vec{f}\)
对于静止的机械臂来说,存在力与力矩平衡
对于连杆 i
\[ ^i f_i - ^i f_{i+1} = 0 \Longrightarrow ^i f_i = ^i f_{i+1} \]
对于连杆 i \(^i n_i\) \(^i n_{i+1}\) \(^i f_{i+1}\) ( \({^i f_{i}}\) i 0 ) \(i\)
\[ ^i n_i - ^i n_{i+1} - ^i P_{i+1} \times ^i f_{i+1} = 0 \]
由此得到:
\[ ^i n_i = ^i n_{i+1} + ^i P_{i+1} \times ^i f_{i+1} \]
静力传递 静力传递表达式
\[ ^i f_i = ^i_{i+1} R^{(i+1)} f_{i+1} \]
\[ ^i n_i = ^i_{i+1} R^{(i+1)} n_{i+1} + ^i P_{i+1} \times ^i f_i \]
为了平衡施加在连杆上的力和力矩,需要在关节提供多大的力矩(旋转关节)或力(移动关节)
旋转关节:
\(f_i\) \(i\) \(n_i\) \(i\) \(\{i\}\) \(n_i\) 1 \(\hat{Z}_i\) 1 \(\hat{Z}_i\) 垂直于 \(\hat{Z}_i\) \(\hat{Z}_i\) \(i\) 主动力矩可表示为 \(\tau_i \hat{Z}_i\) \(\tau_i = |n_i| \cos \theta = |n_i| \hat{Z}_i| \cos \theta = n_i^T \hat{Z}_i\) 移动关节:
\(n_i\) \(\{i\}\) \(f_i\) 1 1 \(i\) \(\tau_i \hat{Z}_i\) \(\tau_i = f_i^T \hat{Z}_i\)
两连杆操作臂,在末端执行器施加作用力向量 \(\vec{F}\)
写出各齐次变换矩阵、外力和外力矩 齐次变换矩阵 \[ {}^0 T_1 = \begin{pmatrix} c_1 & -s_1 & 0 & 0 \\ s_1 & c_1 & 0 & 0 \\ 0 & 0 & 1 & 0 \\ 0 & 0 & 0 & 1 \end{pmatrix}{}^1 ,T_2 = \begin{pmatrix} c_2 & -s_2 & 0 & l_1 \\ s_2 & c_2 & 0 & 0 \\ 0 & 0 & 1 & 0 \\ 0 & 0 & 0 & 1 \end{pmatrix} {}^2 ,T_3 = \begin{pmatrix} 1 & 0 & 0 & l_2 \\ 0 & 1 & 0 & 0 \\ 0 & 0 & 1 & 0 \\ 0 & 0 & 0 & 1 \end{pmatrix} \]
\[ {}^3 f_3 = \begin{pmatrix} f_x \\ f_y \\ 0 \end{pmatrix}, {}^3 n_3 = \begin{pmatrix} 0 \\ 0 \end{pmatrix} \]
从 \(\{3\}\) 轨迹规划 路径和轨迹的区别
路径:机器人位形的一个特定序列,而不考虑机器人位形的时间因素
关节空间轨迹规划 以关节角的函数来描述轨迹的轨迹生成方法
三项式规划
为获得一条确定的光滑运动曲线,至少需要对 \(\phi(t)\)
\(\phi(0) = \phi_0\) ,初始角度为 \(\phi_0\) \(\phi(t_f) = \phi_f\) ,最终角度为 \(\phi_f\) \(\dot{\phi}(0) = \dot{\phi}_0\) ,初始角速度为 \(\dot{\phi}_0\) \(\dot{\phi}(t_f) = \dot{\phi}_f\) ,最终角速度为 \(\dot{\phi}_f\) 这些约束条件唯一确定了一个三次多项式 \(\phi(t) = a_0 + a_1 t + a_2 t^2 + a_3 t^3\)
解为 :
\[ a_0 = \phi_0 \\ a_1 = \dot{\phi}_0\\ a_2 = -\frac{3\phi_0 - 3\phi_f + 2\dot{\phi}_0 t_f + \dot{\phi}_f t_f}{t_f^2}\\ a_3 = \frac{2\phi_0 - 2\phi_f + \dot{\phi}_0 t_f + \dot{\phi}_f t_f}{t_f^3} \]
五次多项式
五次多项式可以指定 \(t_0 (= 0)\) \(t_f\)
\[ \phi(t) = a_0 + a_1t + a_2t^2 + a_3t^3 + a_4t^4 + a_5t^5 \]
\[ \dot{\phi}(t) = a_1 + 2a_2t + 3a_3t^2 + 4a_4t^3 + 5a_5t^4 \]
\[ \ddot{\phi}(t) = 2a_2t + 6a_3t^2 + 12a_4t^3 + 20a_5t^4 \]
解为
\[ a_0 = \phi_0 \\ a_1 = \dot{\phi}_0 \\ a_2 = \frac{\ddot{\phi}_0}{2} \\ a_3 = \frac{20\phi_f - 20\phi_0 - (8\dot{\phi}_f + 12\dot{\phi}_0)t_f - (3\dot{\phi}_0 - \dot{\phi}_f)t_f^2}{2t_f^3} \\ a_4 = \frac{30\phi_0 - 30\phi_f + (14\dot{\phi}_f + 16\dot{\phi}_0)t_f + (3\dot{\phi}_0 - 2\dot{\phi}_f)t_f^2}{2t_f^4} \\ a_5 = \frac{12\phi_f - 12\phi_0 - (6\dot{\phi}_f + 6\dot{\phi}_0)t_f - (\dot{\phi}_0 - \dot{\phi}_f)t_f^2}{2t_f^5} \]
确定中间点期望关节速度 法一 将相邻的关节中间点用直线相连,则该直线的斜率就是两个相邻关节中间点的平均速度 如果某一关节中间点前后两段直线的斜率符号相反,则可将该点的速度取为 0 \(\phi_1\) \(\phi_3\) 如果某一关节中间点前后两段直线的斜率符号相同,则可将该点的速度取为两者的平均值,如 \(\phi_2\)
法二 不直接指定关节中间点处的速度,而是以保证相邻两段三次多项式加速度连续 为原则选取三次多项式系数 考虑三个相邻的关节中间点,依次为 \(\phi_i\) \(\phi_j\) \(\phi_k\) 连接 \(\phi_i\) \(\phi_j\) \[ \phi_{ij}(t) = a_0 + a_1t + a_2t^2 + a_3t^3, t \in [0, t_{f1}] \]
连接 \(\phi_j\) \(\phi_k\) \[ \phi_{jk}(t) = b_0 + b_1t + b_2t^2 + b_3t^3, t \in [0, t_{f2}] \]
!!! attention " 这里将第二段三次多项式的起始时间定为 0 "
满足条件的等式(求解参数)
\[ \phi_{ij}(0) = \phi_i \\ \phi_{ij}(t_{f1}) = \phi_j \\ \phi_{jk}(0) = \phi_j \\ \phi_{jk}(t_{f2}) = \phi_k \\ \dot{\phi}_{ij}(0) = \dot{\phi}_i \\ \dot{\phi}_{jk}(t_{f2}) = \dot{\phi}_k \\ \dot{\phi}_{ij}(t_{f1}) = \dot{\phi}_{jk}(0) \\ \ddot{\phi}_{ij}(t_{f1}) = \ddot{\phi}_{jk}(0) \]
考虑关节中间点的带抛物线过渡的直线段 一些定义
用 \(j\) \(k\) \(l\) \(k\) 处的拟合区段的时间间隔为\(t_k\) 位于点\(j\) 和\(k\) 之间的直线段的时间间隔为\(t_{jk}\) 点\(j\) 和\(k\) 之间总的时间间隔为\(t_{ajk}\) 直线段的速度为\(\dot{\phi}_{jk}\) 点\(j\) 处拟合区段的加速度为\(\ddot{\phi}_j\)
内部路径点计算公式
\[ \dot{\phi}_{jk} = \frac{\phi_k - \phi_j}{t_{ajk}} \\ \ddot{\phi}_k = \text{SGN}(\dot{\phi}_{kl} - \dot{\phi}_{jk}) |\ddot{\phi}_k| \\ t_k = \frac{\dot{\phi}_{kl} - \dot{\phi}_{jk}}{\ddot{\phi}_k} \\ t_{jk} = t_{ajk} - \frac{1}{2}t_j - \frac{1}{2}t_k \]
第一个路径点
\[ t_1 = t_{d12} - \sqrt{t_{d12}^2 - \frac{2(\phi_2 - \phi_1)}{\ddot{\phi}_1}} \]
\[ \dot{\phi}_{12} = \frac{\phi_2 - \phi_1}{t_{d12} - \frac{1}{2}t_1} \\ t_{12} = t_{d12} - t_1 - \frac{1}{2}t_2 \]
最后一个路径点
\[ t_n = t_{d(n-1)n} - \sqrt{t_{d(n-1)n}^2 + \frac{2(\phi_n - \phi_{n-1})}{\ddot{\phi}_n}} \]
\[ \dot{\phi}_{(n-1)n} = \frac{\phi_n - \phi_{n-1}}{t_{d(n-1)n} - \frac{1}{2}t_n} \\ t_{(n-1)n} = t_{d(n-1)n} - t_n - \frac{1}{2}t_{n-1} \]
机器人动力学 加速度的传递 线加速度的传递 我们考虑矢量 \(^B Q\) \(^B V_Q = 0\) \(^B\dot{V}_Q = 0\) ,可以得到:
\[ ^A\dot{V}_Q = ^A\dot{V}_{BORG} + ^A\dot{\Omega}_B \times _B^AR^BQ + ^A\Omega_B \times (^A\Omega_B \times _B^AR^BQ) \]
加速度的传递公式
一般情况: $$ ^Adot{V}Q = ^Adot{V} + _BAR Bdot{V}_Q + 2^AOmega_B times _BAR BV_Q + ^Adot{Omega}_B times _BAR BQ + ^AOmega_B times (^AOmega_B times _BAR BQ) $$ 特殊情况(坐标系A与B的原点重合) $$ ^Adot{V}_Q = _BAR Bdot{V}_Q + 2^AOmega_B times _BAR BV_Q + ^Adot{Omega}_B times _BAR BQ + ^AOmega_B times (^AOmega_B times _BAR BQ) $$
角加速度的传递 具体公式如下:
\[ ^A\Omega_C = ^A\Omega_B + _B^AR^B\Omega_C + ^A\Omega_B \times _B^AR^B\Omega_C \]
惯性张量 考虑离散的质点构成的刚体,惯性张量矩阵如下 :
\[ ^CI = \begin{bmatrix} \sum m_i (y_i^2 + z_i^2) & -\sum m_i x_iy_i & -\sum m_i x_iz_i \\ -\sum m_i x_iy_i & \sum m_i (x_i^2 + z_i^2) & -\sum m_i y_iz_i \\ -\sum m_i x_iz_i & -\sum m_i y_iz_i & \sum m_i (x_i^2 + y_i^2) \end{bmatrix} \]
\(C^ P = [x_i, y_i, z_i]^T\) ,代表刚体上离散的第 i C m_i 代表第 i
记为:
\[ ^CI = \begin{bmatrix} I_{xx} & -I_{xy} & -I_{xz} \\ -I_{xy} & I_{yy} & -I_{yz} \\ -I_{xz} & -I_{yz} & I_{zz} \end{bmatrix} \]
考虑质量连续分布的刚体,用密度函数 \(\rho(x,y,z)\) \(dV\)
\[ I_{xx} = \int_{\mathcal{B}} (y^2 + z^2) \rho(x, y, z) \, dV \\ I_{yy} = \int_{\mathcal{B}} (x^2 + z^2) \rho(x, y, z) \, dV \\ I_{zz} = \int_{\mathcal{B}} (x^2 + y^2) \rho(x, y, z) \, dV \\ I_{xy} = \int_{\mathcal{B}} xy \rho(x, y, z) \, dV \\ I_{xz} = \int_{\mathcal{B}} xz \rho(x, y, z) \, dV \\ I_{yz} = \int_{\mathcal{B}} yz \rho(x, y, z) \, dV \]
惯性张量矩阵的性质
惯性张量是一个对称矩阵 惯性张量中的对角元素\(I_{xx}\) 、\(I_{yy}\) 和\(I_{zz}\) 称为惯性矩 非对角元素\(I_{xy}\) 、\(I_{xz}\) 和\(I_{yz}\) 称为惯性积
牛顿 - 转动型关节
外推 :i: 0
\[ \begin{align*} ^{i+1}\omega_{i+1} &= ^{i+1}_i R ^i \omega_i + \dot{\theta}_{i+1} {}^{i+1}\hat{Z}_{i+1} \\ ^{i+1}\dot{\omega}_{i+1} &= ^{i+1}_i R ^i \dot{\omega}_i + ^{i+1}_i R ^i \omega_i \times \dot{\theta}_{i+1} {}^{i+1}\hat{Z}_{i+1} + \ddot{\theta}_{i+1} {}^{i+1}\hat{Z}_{i+1} \\ ^{i+1}\dot{v}_{i+1} &= ^{i+1}_i R (^i \dot{\omega}_i \times ^i P_{i+1} + ^i \omega_i \times (^i \omega_i \times ^i P_{i+1}) + ^i \dot{v}_i) \\ ^{i+1}\dot{v}_{C_{i+1}} &= ^{i+1}\dot{\omega}_{i+1} \times ^{i+1} P_{C_{i+1}} + ^{i+1}\omega_{i+1} \times (^{i+1}\omega_{i+1} \times ^{i+1} P_{C_{i+1}}) + ^{i+1} \dot{v}_{i+1} \\ ^{i+1} F_{i+1} &= m_{i+1} {}^{i+1}\dot{v}_{C_{i+1}} \\ ^{i+1} N_{i+1} &= {}^{C_{i+1}} I_{i+1} {}^{i+1}\dot{\omega}_{i+1} + {}^{i+1}\dot{\omega}_{i+1} \times {}^{C_{i+1}} I_{i+1} {}^{i+1}\omega_{i+1} \end{align*} \]
内推 :i: n+1\(\quad \quad\) \(^{n+1} f_{n+1} = 0, \ ^{n+1} n_{n+1} = 0\)
\[ \begin{align*} ^{i} f_i &= ^{i}_{i+1} R ^{i+1} f_{i+1} + ^i F_i \\ ^{i} n_i &= ^i N_i + ^{i}_{i+1} R ^{i+1} n_{i+1} + ^i P_{C_i} \times ^i F_i + ^i P_{i+1} \times ^{i}_{i+1} R ^{i+1} f_{i+1} \\ \tau_i &= ^i n_i^T {}^i\hat{Z}_i \end{align*} \]
平动型关节
外推:
\[ \begin{align*} ^{i+1}\omega_{i+1} &= ^{i+1}_i R ^i \omega_i \\ ^{i+1}\dot{\omega}_{i+1} &= ^{i+1}_i R ^i \dot{\omega}_i \\ ^{i+1}\dot{v}_{i+1} &= ^{i+1}_i R [^i \dot{v}_i + ^i \dot{\omega}_i \times ^i P_{i+1} + ^i \omega_i \times (^i \omega_i \times ^i P_{i+1})] + \ddot{d}_{i+1} {}^{i+1}\hat{Z}_{i+1} + 2 ^{i+1} \omega_{i+1} \times \dot{d}_{i+1} {}^{i+1}\hat{Z}_{i+1} \\ ^{i+1}\dot{v}_{C_{i+1}} &= ^{i+1}\dot{\omega}_{i+1} \times ^{i+1} P_{C_{i+1}} + ^{i+1}\omega_{i+1} \times (^{i+1}\omega_{i+1} \times ^{i+1} P_{C_{i+1}}) + ^{i+1} \dot{v}_{i+1} \\ ^{i+1} F_{i+1} &= m_{i+1} \dot{v}_{C_{i+1}} \\ ^{i+1} N_{i+1} &= {}^{C_{i+1}} I_{i+1} {}^{i+1}\dot{\omega}_{i+1} + {}^{i+1}\dot{\omega}_{i+1} \times {}^{C_{i+1}} I_{i+1} {}^{i+1}\omega_{i+1} \end{align*} \]
内推:
\[ \begin{align*} ^{i} f_i &= ^{i}_{i+1} R ^{i+1} f_{i+1} + ^i F_i \\ ^{i} n_i &= ^i N_i + ^{i}_{i+1} R ^{i+1} n_{i+1} + ^i P_{C_i} \times ^i F_i + ^i P_{i+1} \times ^{i}_{i+1} R ^{i+1} f_{i+1} \\ \tau_i &= ^i f_i^T {}^{i}\hat{Z}_i \end{align*} \]
拉格朗日法 连杆的动能
\[ k_i = \frac{1}{2} m_i v_{C_i}^\top v_{C_i} + \frac{1}{2} {^i\omega_i}^\top {^i_c}_i I_i {^i\omega_i} \]
\[ = \frac{1}{2} m_i v_{C_i}^\top v_{C_i} + \frac{1}{2} {\omega_i}^\top {^0_i R}^\top {^c_i} I_i {^0_i R}^\top \omega_i \]
方程如下
\[ M(\Phi)\ddot{\Phi} + C(\Phi, \dot{\Phi})\dot{\Phi} + B\dot{\Phi} + G(\Phi) = \tau \]
\(M(\Phi)\)
\[ M(\Phi) = \sum_{i=1}^{2} \left( m_i \left( f_p^{(i)} \right)^\top I_p^{(i)} + \left( f_o^{(i)} \right)^\top {^0_i R}^{c_i} I_i {^0_i R^\top} f_o^{(i)} \right) \]
对于参数 \(B\) :\(B = \text{diag}(b_1, ..., b_N), \quad b_i \text{为折算到关节} i \text{的粘滞摩擦参数},一般为0\)
对于矩阵 \(C(\Phi, \dot{\Phi})\) , Christoffel \(C(\Phi, \dot{\Phi})\)
Christoffel 符号计算公式如下:
\[ c_{kji} = \frac{1}{2} \left( \frac{\partial m_{ij}}{\partial \phi_k} + \frac{\partial m_{ik}}{\partial \phi_j} - \frac{\partial m_{jk}}{\partial \phi_i} \right) \]
矩阵 \(C\)
\[ \begin{bmatrix} \sum_k c_{k11} \phi_k & \sum_k c_{k21} \phi_k & \cdots & \sum_k c_{kj1} \phi_k & \cdots & \sum_k c_{kN1} \phi_k \\ \sum_k c_{k12} \phi_k & \sum_k c_{k22} \phi_k & \cdots & \sum_k c_{kj2} \phi_k & \cdots & \sum_k c_{kN2} \phi_k \\ \vdots & \vdots & \ddots & \vdots & \ddots & \vdots \\ \sum_k c_{k1i} \phi_k & \sum_k c_{k2i} \phi_k & \cdots & \sum_k c_{kji} \phi_k & \cdots & \sum_k c_{kNi} \phi_k \\ \vdots & \vdots & \ddots & \vdots & \ddots & \vdots \\ \sum_k c_{k1N} \phi_k & \sum_k c_{k2N} \phi_k & \cdots & \sum_k c_{kjN} \phi_k & \cdots & \sum_k c_{kNN} \phi_k \\ \end{bmatrix} \]
最后是矩阵 \(G\)
\[ g_i(\Phi) = \frac{\partial u}{\partial \theta_i} = -\sum_{j=1}^2 m_j^0 g^T \frac{\partial^0 P_{C_j}}{\partial \theta_i} \]
运动控制 运动控制
独立关节控制在不知道其他关节的情况时,假设干扰为节约信号,其 PD PID PID
独立关节控制
关节模型如下:
\[ J_{ci}\ddot{\theta}_i + B_{ci}\dot{\theta}_i = J_{ci}\dot{\omega}_i + B_{ci}\omega_i = K_{ci}U_{ci} - T_{ci} \]
式中,关节 \(i\) \(J_{ci}\) \(B_{ci}\) \(K_{ci}\)
\[ J_{ci} = J_{mi} + \eta_i^2 J_{mi} \]
\[ B_{ci} = b_{mi} + \eta_i^2 b_{mi} + \frac{\eta_i^2 C_{Ti} k_{ci}}{R_{mi}} \]
\[ K_{ci} = \frac{\eta_i C_{Ti} k_{ci}}{R_{mi}} \]
从形式上看,单关节模型式是一个控制输入为 \(U_{ci}\) \(T_{ci}\) \(\theta_i\)
经过拉式变换之后,可以得到其传递函数模型如下:
\[ \theta_i(s) = \frac{K_{ci}}{s(J_{ci}s + B_{ci})} U_{ci}(s) - \frac{1}{s(J_{ci}s + B_{ci})} T_{ci}(s) \]
阶跃输入的 PD
模型如下:
\[ U_{ci}(s) = k_{Pi} \tilde{\theta}_i(s) - k_{Di} \omega_i(s)\\ 其中 \tilde{\theta}_i(s) = \theta_{di}(s) - \theta_i(s) \]
在独立关节 PD 0
欠阻尼、过阻尼、临界阻尼
阶跃输入的 PID
模型如下
\[ U_{ci}(s) = \left(k_{Pi} + \frac{k_{Ii}}{s}\right) \tilde{\theta}_i(s) - k_{Di} \omega_i(s) \]
稳定性
根据劳斯判据得到,当 \(K_p\) \(K_i\) 、\(K_d\) \((B_{ci} + k_{Di} K_{ci}) k_{Pi} > J_{ci} k_{Ii}\) PID \(k_{Ii} = 0\) ,设计 \(k_{Pi}\) 和 \(k_{Di}\) 以达到满意的动态性能,然后在上式约束范围内选择合适的 \(k_{Ii}\) ,以在动态性能基本不变的情况下消除静态误差。
输入二阶可导的 PID
PID+ 前馈控制
模型如下:
前馈的引入是为了完全消除参考输入对偏差的影响
转矩前馈控制 先计算出机械臂的动力学模型,根据动力学模型的公式,去带入独立关节控制,推导出实际的干扰项 \(T_{ci}\)
如下所示,在上面的前馈控制的基础上加了对干扰项的补偿
\[ \begin{align*} U_{c1}(s) &= \left(k_{P1} + \frac{k_{I1}}{s}\right) \tilde{\theta}_1(s) - k_{D1} \omega_1(s) + \frac{J_{c1}}{K_{c1}} s^2 \theta_{d1}(s) + \left(\frac{B_{c1}}{K_{c1}} + k_{D1}\right) s \theta_{d1}(s) + \frac{1}{K_{c1}} \hat{T}_{c1}(s) \\ U_{c2}(s) &= \left(k_{P2} + \frac{k_{I2}}{s}\right) \tilde{\theta}_2(s) - k_{D2} \omega_2(s) + \frac{J_{c2}}{K_{c2}} s^2 \theta_{d2}(s) + \left(\frac{B_{c2}}{K_{c2}} + k_{D2}\right) s \theta_{d2}(s) + \frac{1}{K_{c2}} \hat{T}_{c2}(s) \end{align*} \]
集中控制 电流反馈 采用电流反馈的方法,转矩与电流成正比 ,
\[ 转矩公式: T_{ei} = C_{Ti} I_{mi}\\ 控制律:U_{ci} = \pi_{pi}(V_{ci} - I_{mi}) \]
式中,\(V_{ci}\)
关节模型建立如下:
\[ J_{ci}\dot{\omega}_i + \overline{B}_{ci}\omega_i = \overline{K}_{ci}V_{ci} - T_{ci} \]
其中
\[ \overline{B}_{ci} = b_{ai} + \eta_i^2 b_{mi} + \frac{\eta_i^2 C_{Ti} k_{ei}}{k_{ui} \pi_{pi} + R_{mi}}\\ \overline{K}_{ci} = \frac{\eta_i C_{Ti} k_{ui} \pi_{pi}}{k_{ui} \pi_{pi} + R_{mi}} \]
被控对象模型 \[ M(\Phi) \ddot{\Phi} + C(\Phi, \dot{\Phi}) \dot{\Phi} + L \dot{\Phi} + G(\Phi) = \tau_d \]
其中
\[ L = B + B_e \]
重力补偿 PD
控制律:
\[ \tau_d = \Lambda_P (\Phi_d - \Phi) - \Lambda_D \dot{\Phi} + G(\Phi) \]
李雅普诺夫稳定性
逆动力学控制 一般来说,设计系统的控制律时,把控制器分为基于模型的控制部分和位置矫正部分
例如,对于一个二阶线性系统 ( ) :
\[ m\ddot{x}+b\dot{x}+kx=f \]
假设可检测质量块的位置和速度,则设计控制律:\( f = -k_p x - k_v \dot{x} \)
两式联立,得:\( m\ddot{x} + (b + k_v)\dot{x} + (k + k_p)x = 0 \)
\(\alpha\) -\(\beta\)
为了消除非线性项的误差,可以采用 *\(\alpha\) -\(\beta\) f
\[ m\ddot{x} + b\dot{x} + kx = f \]
\[ m\ddot{x} + b\dot{x} + kx = \alpha f' + \beta \]
取 \(\beta = b\dot{x} + kx\) \(\alpha = m\)
[ ddot{x} = f' ] 简化为质量模型
同样,设计控制律 \(f' = -k_v \dot{x} - k_p x\)
代入上式,得 \(\ddot{x} + k_v \dot{x} + k_p x = 0\)
根据期望的控制性能确定 \(k_p\) \(k_v\)
内环控制律
\[ \begin{cases} M(\Phi)\ddot{\Phi} + C(\Phi, \dot{\Phi})\dot{\Phi} + L\dot{\Phi} + G(\Phi) = \tau_d \\ \tau_d = M(\Phi)a_{\Phi} + C(\Phi, \dot{\Phi})\dot{\Phi} + L\dot{\Phi} + G(\Phi) \end{cases} \Rightarrow \ddot{\Phi} = a_{\Phi} \quad \]
对每个双积分系统,可实施“前馈 +PD
即 \(a_{\Phi} = \ddot{\Phi}_d + K_P (\Phi_d - \Phi) + K_D (\dot{\Phi}_d - \dot{\Phi})\)
其中 \(K_P\) \(K_D\)
逆运动学控制的缺点是系统参数必须是精确已知的。
鲁棒控制 对于逆运动学控制的改进——对参数进行合理估计值
故,非线性反馈值变为如下情况:
\[ \tau_d = \hat{M}(\Phi) a_{\Phi} + \hat{C}(\Phi, \dot{\Phi}) \dot{\Phi} + \hat{L} \dot{\Phi} + \hat{G}(\Phi) \quad (8-95) \]
式中,\(\hat{M}(\Phi)\) 、\(\hat{C}(\Phi, \dot{\Phi})\) 、\(\hat{L}\) \(\hat{G}(\Phi)\) \(M(\Phi)\) \(C(\Phi, \dot{\Phi})\) 、\(L\) \(G(\Phi)\)
\[ \begin{align*} \bar{M}(\Phi) &= M(\Phi) - \hat{M}(\Phi) \quad (8-96) \\ \bar{C}(\Phi, \dot{\Phi}) &= C(\Phi, \dot{\Phi}) - \hat{C}(\Phi, \dot{\Phi}) \quad (8-97) \\ \bar{L} &= L - \hat{L} \quad (8-98) \\ \bar{G}(\Phi) &= G(\Phi) - \hat{G}(\Phi) \quad (8-99) \end{align*} \]
因此,鲁棒控制的模型如下:
\[ M(\Phi)\ddot{\Phi} = M(\Phi)a_{\Phi} - (M(\Phi) - \hat{M}(\Phi))a_{\Phi} - (C(\Phi, \dot{\Phi}) - \hat{C}(\Phi, \dot{\Phi}))\dot{\Phi} - (L - \hat{L})\dot{\Phi} - (G(\Phi) - \hat{G}(\Phi)) \\ = M(\Phi)a_{\Phi} - \bar{M}(\Phi)a_{\Phi} - \bar{C}(\Phi, \dot{\Phi})\dot{\Phi} - \bar{L}\dot{\Phi} - \bar{G}(\Phi) \\ \dot{\Phi} = a_{\Phi} - M^{-1}(\Phi)(\bar{M}(\Phi)a_{\Phi} + \bar{C}(\Phi, \dot{\Phi})\dot{\Phi} + \bar{L}\dot{\Phi} + \bar{G}(\Phi)) = a_{\Phi} - \Delta \]
\(\Delta\)
外环控制律 \(a_{\Phi} = \ddot{\Phi}_d + K_P (_d - \Phi) + K_D (\dot{\Phi}_d - \dot{\Phi}) + \Xi\)
自适应控制 自适应控制,被控对象模型采用参数线性化形式,即
\[ Y(\Phi, \dot{\Phi}, \ddot{\Phi}) \Psi = M(\Phi) \ddot{\Phi} + C(\Phi, \dot{\Phi}) \dot{\Phi} + L \dot{\Phi} + G(\Phi) = \tau_d \]
式中,\(\Psi\) ( )
自适应控制
参数线性化后,基于 \(\Psi\) :
内环控制律 :
\[ \tau_d = Y(\Phi, \dot{\Phi}, \alpha_{\phi}) \hat{\Psi} = \hat{M}(\Phi) \alpha_{\phi} + \hat{C}(\Phi, \dot{\Phi}) \dot{\Phi} + \hat{L} \dot{\Phi} + \hat{G}(\Phi) \]
外环控制律 :
\[ a_{\phi} = \ddot{\Phi}_d + K_P (\Phi_d - \Phi) + K_D (\dot{\Phi}_d - \dot{\Phi}) \]
力控制 力位混合控制器 小测 Q1- 旋转矩阵性质证明,\(R(a \times b) = (Ra) \times (Rb)\) ,其中 \(R\) \(a, b \in \mathbb{R}^3\) 。
定义法证明补全
首先 ,我们知道向量叉积 \(a \times b\) \[ \det(x, a, b) = \langle x, a \times b \rangle \quad \text{对于任意 } x \in \mathbb{R}^3 \]
\[ \det(x, a, b) = \begin{vmatrix} x_1 & x_2 & x_3 \\ a_1 & a_2 & a_3 \\ b_1 & b_2 & b_3 \end{vmatrix} \]
\[ \langle x, a \times b \rangle = \begin{bmatrix} x_1 & x_2 & x_3 \end{bmatrix} \begin{bmatrix} a_2b_3 - a_3b_2 \\ a_3b_1 - a_1b_3 \\ a_1b_2 - a_2b_1 \end{bmatrix} = \begin{vmatrix} x_1 & x_2 & x_3 \\ a_1 & a_2 & a_3 \\ b_1 & b_2 & b_3 \end{vmatrix} \]
现在 ,考虑 \(R \in SO(3)\)
由于 \(R\)
\[ R^T = R^{-1}。 \]
\[ \langle x, R(a \times b) \rangle = \langle R^T x, a \times b \rangle = \det(R^{-1}x, a, b)。 \]
\[ \det(R) = 1, \]
所以:
\[ \det(R)\det(R^{-1}x, a, b) = \det(x, Ra, Rb) = \langle x, Ra \times Rb \rangle。 \]
由于对于任意 \(x \in \mathbb{R}^3\) : \[ \langle x, R(a \times b) \rangle = \langle x, Ra \times Rb \rangle, \]
根据内积的性质,可得:
\[ R(a \times b) = (Ra) \times (Rb)。 \]
2025年4月13日 19:27:26 2025年2月17日 15:02:43